V
主页
Target-Free and User-Friendly online extrinsic calibration of LiDAR-IMU-Camera s
发布人
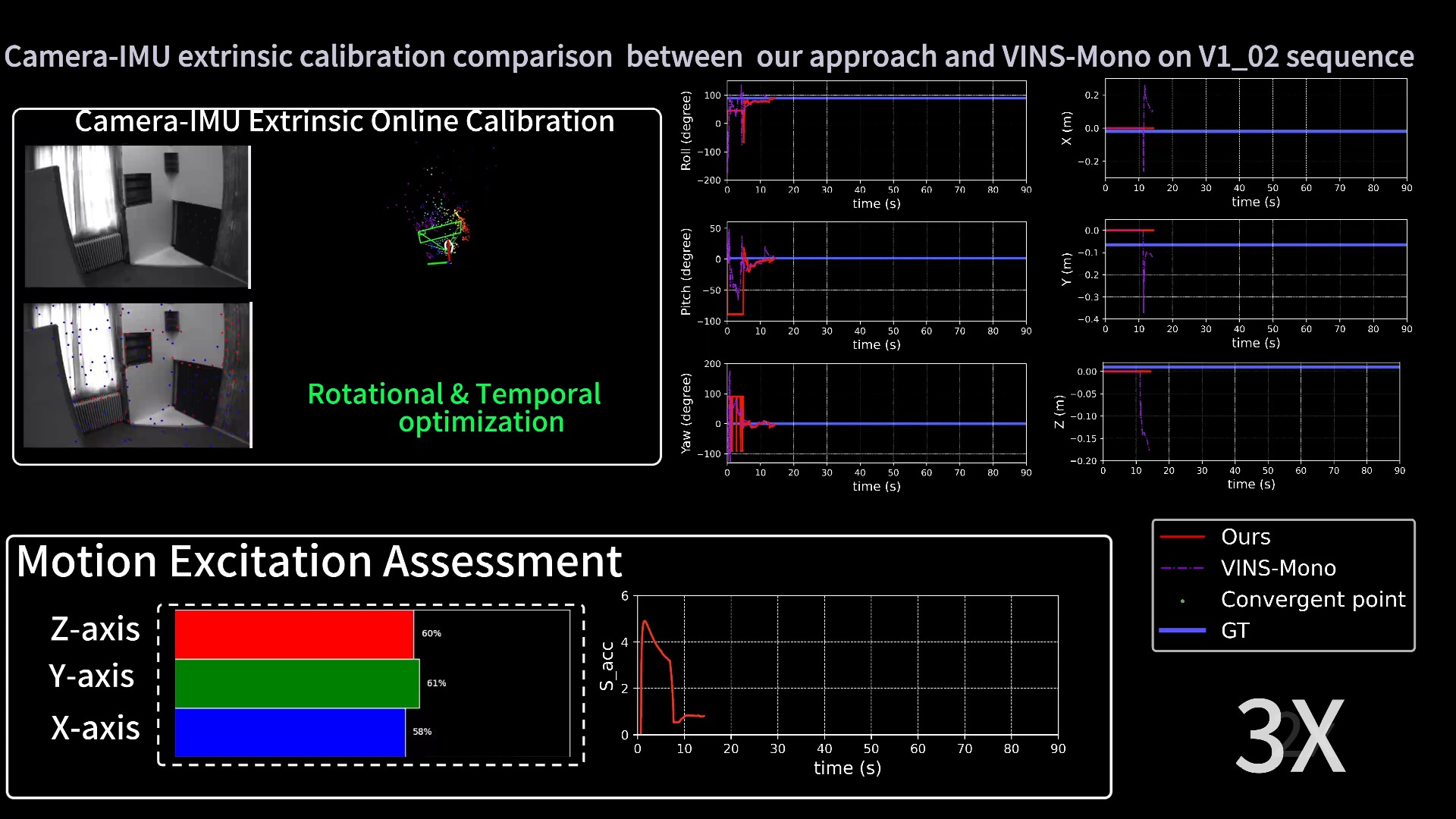
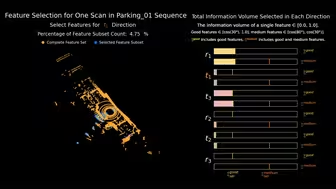
Y. Wang, X. Zhang* , R. Wang, Z. Song, and Y. Tong. Target-Free and User-Friendly online extrinsic calibration of LiDAR-IMU-Camera systems guided by motion excitation assessment. IEEE Transactionson Intelligent Vehicles , accepted. ( https://ieeexplore.ieee.org/abstract/document/10547385/ ) Abstract: Robust and reliable calibration forms the foundation of efficient multi-sensor fusion. Most existing calibration methods are offline and rely on artificial targets, which is time consuming and unfriendly to non-expert users. To improve efficiency, robustness and user-friendliness, this paper proposes a novel target-free LiDAR-IMU-camera online extrinsic calibration framework. An IMU-centric motion excitation assessment method is newly designed to assist non-expert users in data collection, serving as the termination criterion for extrinsic rotation initialization. We calibrate the extrinsic parameters of the LiDAR and camera relative to the IMU in real-time and in parallel without any priori knowledge: (i) For camera-IMU calibration, a new convergence criterion based on the coefficient of variation is proposed to judge if the calibration has been accomplished. (ii) For LiDAR-IMU calibration, a data selection strategy is designed to concurrently record a segment of original data from both the LiDAR and IMU during initialization. Subsequently, the selected data is utilized to refine the extrinsic parameters under a continuous-time batch optimization framework. Moreover, a scene recognition algorithm is proposed to autonomously select parameters according to indoor or outdoor features. Finally, we leverage the IMU as a bridge for computing the LiDAR-camera extrinsic parameters. Extensive real experiments on our self-recorded and public datasets show the high accuracy and robustness of the proposed method, with an average error of less than 0.01m in translation and 0.5° in rotation.
打开封面
下载高清视频
观看高清视频
视频下载器
TC2LI-SLAM: A Tightly-Coupled Camera-LiDAR-Inertial SLAM System
SFRE: Safe and Fast Robotic Exploration for 3D Uneven terrains
SGS-Planner: A skeleton-guided spatiotemporal motion planner for flight in const
Fast and Communication-Efficient Multi-UAV Exploration Via Voronoi Partition on
【IEEE RAL2024代码最新开源: 崎岖地形具有“大区域意识”的安全快速探索策略LRAE】
Incremental 2-D line segment-based mapping
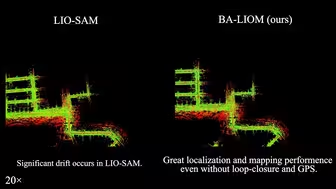
BA-LIOM: Tightly-coupled Laser-Inertial odometry and mapping with bundle adjustm
G2VD Planner: efficient motion planning with grid-based generalized Voronoi dia
FI-SLAM: Feature Information-Based Robust and Efficient Vision-Inertial-Aided Li
MRPB 1.0: A unified benchmark for the evaluation of mobile robot local planning
TMPU: A Framework for Terrain Traversability Mapping and Planning in Uneven and
Newly added: An Enhanced Framework for Fast Trajectory Recovery under IVDs
speedybee25飞塔存在严重的设计质量问题
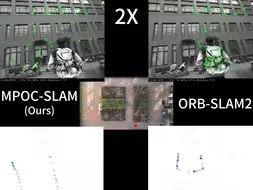
MPOC-SLAM: an RGB-D SLAM system with motion probability and object category in
IR-VIO Illumination-Robust Visual-Inertial Odometry Based on Adaptive Weighting
LLM-PySC2:LLM starcraft II learning environment 基于pysc2的大语言模型星际争霸2决策仿真训练环境
CURE- A Hierarchical Framework for Multi-Robot Autonomous Exploration(Video_1)
CURE- A Hierarchical Framework for Multi-Robot Autonomous Exploration(Video_2)
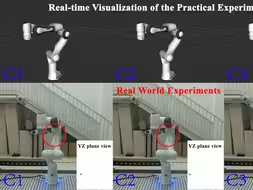
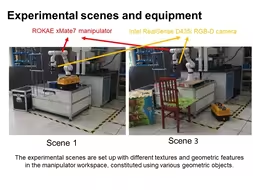
High-Accuracy Pose Estimation for 3D Reconstruction Considering the Manipulator
当下搞钱的大趋势——低空飞行,悄悄看,抓紧干!
不要迷信PIX飞控,滑跑着陆直接侧翻炸机,拉都拉不起来,唉!
openipc到底怎样?runcam wifilink开箱评测 试飞 双11交个朋友449一套带回家
开源国产重山飞塔开箱,AT32飞控+50A HF32电调
这是全球第一架超音速无人机!美国至今都还没研究明白它的参数!
兄弟们赶紧去珠海航展活抓!台湾省主播郑亦真千万不要放过小舰长!
实验:无人机在真空环境里,还能起飞吗?
潜艇装飞控,测试下水姿态
“双尾蝎B”无人机空中表演,台媒主播兴奋大喊:天呐!
零门槛与专业性并存!哈浮X1 PROMAX有多好玩你根本想不到!
一分钟告诉你大疆新品N3眼罩值不值得买
“九天”蜂巢母舰,这样的无人机,你爱了吗?
一个方法教你无人机甩尾运镜!
晓莹姐姐直播探访室外展区
东峰F80-VTOL智控无人机
首飞实测Mario5DC穿越机,它更适合拍摄还是花飞呢?
无人版轰20?彩虹7是真家伙,能上舰,连空射高超都安排上了?
“蜂巢母舰”亮相珠海航展,搭载不同型号无人机,侦察攻击两不误
FPV大神手持tango2,背10寸徒步山顶,远航11公里,强者从不抱怨丢机,就怕飞太远没法上厕所。上次把飞机飞丢了,两天找回来的大神接着徒步刷山!
中国航展今日开幕 灰鲸飞行首秀重磅登场