V
主页
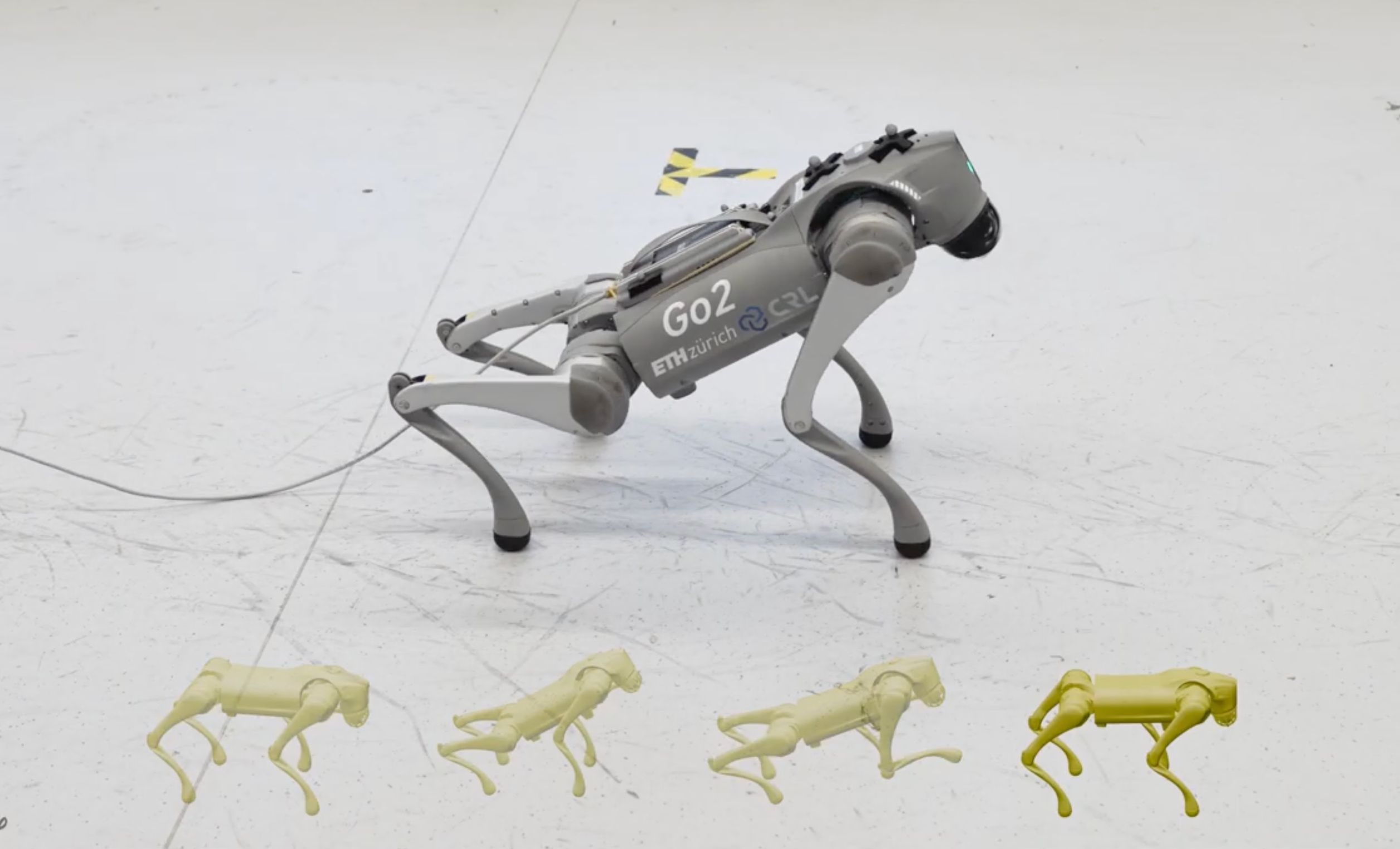
RobotKeyframing:四足机器人学习高层次目标的运动|2024【迪士尼】
发布人
Zargarbashi, Fatemeh, et al. "RobotKeyframing: Learning Locomotion with High-Level Objectives via Mixture of Dense and Sparse Rewards." arXiv preprint arXiv:2407.11562 (2024). https://studios.disneyresearch.com/2024/11/04/robotkeyframing-learning-locomotion-with-high-level-objectives/
打开封面
下载高清视频
观看高清视频
视频下载器
极限越野 | "山猫" 全地形越野机器人
飞龙机器人:空中机器人实现了工业阀门操作|2022【東京大学】
电子科技大学2024新工科作品展——ROBOCON全国大学生机器人大赛冠军作品
机器人男友
微小型管道机器人:实现亚厘米级管道探测|2022|清华大学【Science Robotics】
【机器人科学III】让机器人拥有类人触觉感知,哥伦比亚大学机器人实验室最新进展
学习轮腿机器人的鲁棒自主导航和运动|2024|Science Robotics【苏黎世联邦理工学院】
【up自制开源】30分钟拥有自己的具身智能触觉系统!柔性触觉不再遥不可及
摆脱“机械感”,“全面拟人”Cyan青心意创Orca Ⅰ震撼来袭!
开源Mobile ALOHA:学习双手移动操作|2024【斯坦福大学】
小机器人拐走12台大机器人
【Actuate 2024】中文字幕|机器人基础模型 - Robotic Foundation Models|Sergey Levine
使用Isaac Sim和ROS2实现大田农业机器人
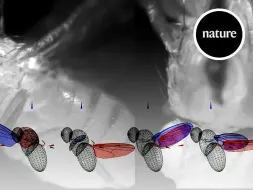
人工智能和机器人揭开了苍蝇翅膀运动的控制机制|2024|Nature【加州理工】
人形机器人越野?! DR01野外测试
触手机器人可以轻轻抓取易碎物品|2022【哈佛大学】
Agile But Safe:学习无碰撞高速腿式运动|2024【CMU】
仿生蜜蜂BionicBee|2024【Festo】
RLBench机器人模仿学习大规模测试框架——任务展示
栖息的类鸟机器人|2021|斯坦福大学【Science Robotics】
逼真面部表情机器人:人机面部表情协同|2024|Science Robotics【哥伦比亚大学】
工训赛超强防干扰定位算法展示
【研三】自研多模态大模型架构——长时程、高鲁棒
泡泡造软体机器人|2021【Nature】
6轴机械臂运动学正逆解验证程序,三连留邮箱
Magnecko;机器人像蜘蛛侠一样爬墙和天花板|2023【苏黎世联邦理工学院】
新开的希尔顿欢朋酒店,居然进化到这种程度了?
超越GPT-4o mini!北大开源国产多模态版o1,超强视觉推理惊呆网友
手写DiffusionPolicy【1】:最简单的机器人操作
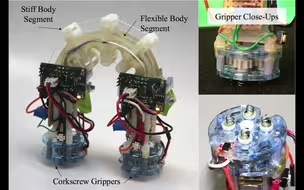
Flippy:一种软体自主攀爬机器人|2017【哈佛大学工程与应用科学学院】
Clone Robotics发布了Torso机器人
蜘蛛启发的电液软驱动关节|2021【马克斯普朗克智能系统研究所】
四足机器人学习爬梯子|2024【苏黎世联邦理工学院】
开源库PyPose:无缝连接经典机器人技术与现代学习方法|2023【CMU】
轮足机器人|2021|TIMA【乌克兰】
开源仿生机器腿|2021【密歇根大学】
用于微型飞行器的液体放大执行器|2022|英国布里斯托大学【Science Robotics】
【珠海航展】“嘬嘬嘬”可以让机器狗过来吗?
Dobb·E 一个开源的家庭机器人操作臂端到端学习训练框架
管道攀爬机器人:RSTAR|2022【Ben-Gurion University of the Negev】