V
主页
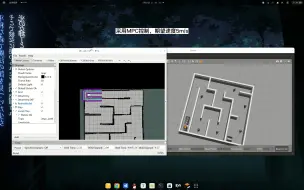
【MPC】模型预测控制&轨迹跟踪&智能车
发布人
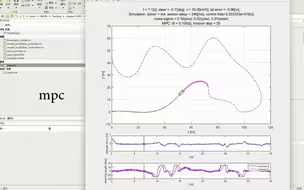
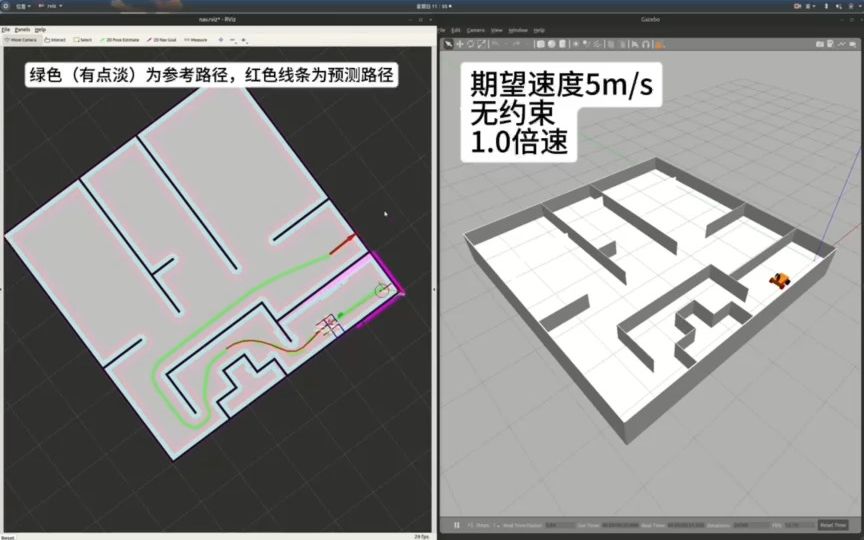
本项目基于 ROS navigation + MPC 实现。navigation完成感知,全局规划,定位等任务,MPC订阅全局路径并进行跟随。项目使用的MPC是基于麦轮底盘运动学模型的线性MPC(三积分模型),对麦轮的速度,加速度,加加速度进行了约束。仿真环境使用的是 GAZEBO,地图为科大讯飞17届智能车线下赛地图,仿真车模使用的是16届科大讯飞智能车竞赛线上赛车模。MPC基于高飞老师运动规划课程的作业修改。 github链接:https://github.com/jwk1rose/MPC-Application-in-Trajectory-Tracking 高飞老师课链接:https://www.shenlanxueyuan.com/course/604 科大讯飞智能车竞赛官网链接:http://www.iflyros.com/study
打开封面
下载高清视频
观看高清视频
视频下载器
mpc轨迹跟踪,找的网上开源的
开源!ROS C++实现的NMPC和LMPC轨迹跟踪
路径规划与轨迹跟踪系列算法学习_第13讲_模型预测控制(MPC)法
16届智能车讯飞线上赛mpc只需6s?
关于MPC和NMPC的几个小demo
改进混合A* + MPC轨迹优化 + 轨迹跟踪(纯跟踪 + PID)
模型预测控制mpc-ROS仿真
【移动机器人轨迹跟踪控制】自主开发的控制器重复跟踪实验
hybrid A*路径规划,加上了纯跟踪控制
mpc跟踪minimum jerk 轨迹
【路径规划Gazebo仿真】自适应DWA与传统DWA路径规划效果对比
史上最糟糕的无人车模型预测控制(MPC算法)轨迹跟踪控制入门必学爆品课程(精简版)
模型预测控制(MPC)简介和公式简要推导
无人艇轨迹跟踪,线性mpc,这破玩楞太麻烦了
基于运动学模型的模型预测控制(MPC)轨迹跟踪MATLAB代码实现
ACADO生成NMPC代码,贼拉快!
MPC, Pure_Pursuit, PID路径跟踪控制器设计与仿真
无人驾驶车辆MPC局部路径规划+轨迹跟踪全集
手推MPC公式
自动驾驶作业1 轨迹跟踪
移动机器人轨迹跟踪控制,运动控制,采用速度规划跟踪直线、贝塞尔曲线
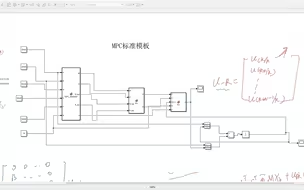
通俗易懂的MPC--simulink模板--建模过程
轨迹优化开源库使用效果,后续准备用来做路径平滑
全局路径规划 路径跟踪
轨迹规划与跟踪控制
【MPC模型预测控制器】4_完整案例讲解 - Octave代码
基于动力学模型的模型预测控制(MPC)轨迹跟踪算法Carsim和simulink联合仿真实现
模型预测控制(MPC)
PID、LQR、MPC实时控制倒立摆仿真对比
MPC-CBF静态避障
自动驾驶学前班项目:使用MPC的CarRacing自动驾驶
【MPC模型预测控制器】3_一个详细的建模例子
模型预测控制(2022春)lecture 1-1 Unconstrained MPC
17届讯飞智能车 卷不动了
【MPC模型预测控制器】1_最优化控制和基本概念
逆透视原理推导
【控制】模型预测控制 MPC 【合集】Model Predictive Control
ROS-C++横纵向解耦MPC轨迹跟踪控制
你还在用PID?MPC模型预测控制,从公式到代码!
【MPC模型预测控制器】2_最优化数学建模推导