V
主页
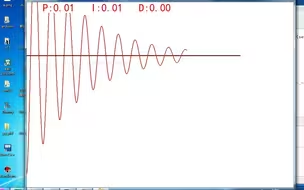
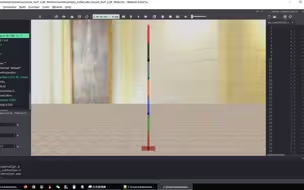
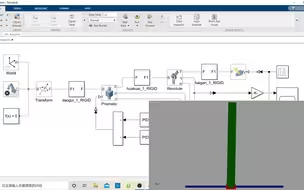
PID、LQR、MPC实时控制倒立摆仿真对比
发布人
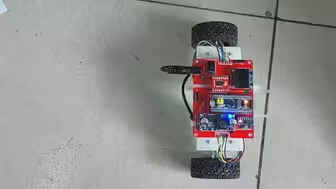
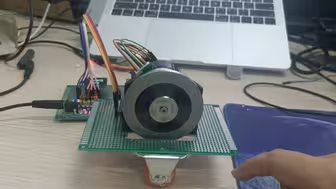
基于MuJoCo的倒立摆实时控制仿真,尽可能的基于现实控制硬件的方式去实现,仿真运行在Apple M1芯片/10代i5(6C12T)上,基于Python实现了使用PID、LQR、MPC在MuJoCo仿真中200Hz实时控制频率,希望并尝试去构建一套Sim2Real的系统,目前硬件也已经基本搭建完毕,后面等软硬件进一步测试完善会「开源软硬件」并试试看「制作相关课程」哈哈,有空也可以催一催我~ 倒立摆的XML模型参考这个项目:https://github.com/deepmind/dm_control,无比感谢,非常符合个人审美~
打开封面
下载高清视频
观看高清视频
视频下载器
二级倒立摆
一阶倒立摆LQR, MPC控制,Python, C++源码公开, Gazebo仿真
LQR算法平衡小车,有效解决pid难以消除零点晃动问题
PID太难调了,都抖成拖拉机了
直线一级PID倒立摆控制
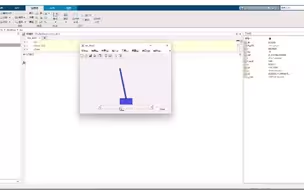
MATLAB直线倒立摆一阶倒立摆LQR控制仿真
一阶倒立摆的PID控制和LQR控制
终于平衡了,稳如老狗
matlab一阶直线倒立摆
动画演示PID参数作用
PID每个参数的不同作用
轮腿终于立起来了(๑>_<๑),原来 lqr 调参只需十秒•ᴗ•💧
你还不会动量轮平衡嘛
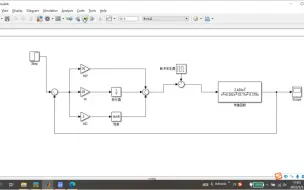
simulink一阶倒立摆仿真,pid倒立摆
LQR控制,参数趋于完美⦁֊⦁
PID控制电机转速
七级倒立摆LQR控制——Webots仿真C语言控制七阶倒立摆(Seven-Link Inverted Pendulum System)
MPC、LQR控制算法在simulink联合Prescan中的仿真
一个PID参数没调好的弟弟倒立摆...
写傻我了
MATLAB直线倒立摆一阶倒立摆LQR控制仿真
Matlab倒立摆仿真
自平衡莱洛三角(V2)复刻记录
自动化专业究竟学些啥:三阶倒立摆“控制”,飘柔般丝滑,简直妖孽
球自平衡PID系统
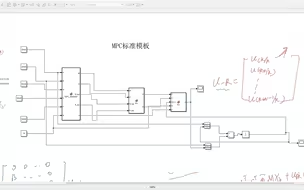
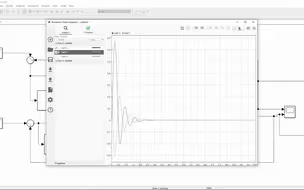
通俗易懂的MPC--simulink模板--建模过程
开启后吸引了整个实验室目光的PID平衡车
【搬】平衡车欣赏
MPC控制的狗子
基于经典PID控制算法的倒立摆仿真实验
当你过度相信自己刚调好的pid
【搬】-带屏幕的PID平衡三角
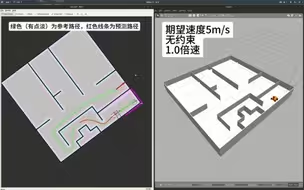
【MPC】模型预测控制&轨迹跟踪&智能车
无刷电机平衡车完整控制
MuJoCo 仿真 案例欣赏
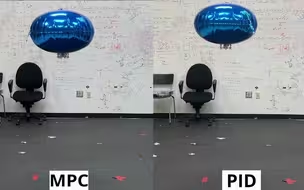
室内气球定高控制 (MPC与PID对比)
倒立摆PID控制
Pid跟踪控制和mpc跟踪控制 对比,需要源码点赞关注私聊up
NMPC+WBC+mujoco仿真 12自由度双足人形机器人行走控制
三级倒立摆控制 Triple Pendulum on a Cart