V
主页
机器人学 1.7 关于旋转矩阵和齐次变换矩阵的一些例题
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
机器人女友的仿生口腔
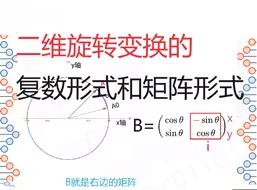
其实一点也不难,二维旋转变换的复数形式和矩阵形式
机器人学 1.6 齐次变换矩阵 T 的逆矩阵公式
机器人学 1.3 左乘右乘同时作用于当前坐标系的情况
机器人学 3.2 拉格朗日动力学算法(Lagrangian mechanics)
二维旋转的李代数,其实一点也不难,
机器人学 1.1 左乘(pre-multiply)的意义
机器人学 1.5 旋转矩阵的性质(求出T^-1的条件)
机器人学 1.23 用标准DH建模的一些例子 以及 逆运动学求解
机器人学 1.19 标准DH参数
手搓GPU系列二更,present换成了双缓存vdma,加了矩阵运算做世界坐标变换(相当于vs),所以兔子也会转了
机器人学 1.9 进一步理清齐次变换矩阵的意义(在正逆运动学之前)
发明咬人玩具的人真是个天才,它是如何做到纯机械随机触发的
机器人学 2.6 雅可比矩阵总述
机器人学 1.20 用标准DH参数建模Aubo机械臂
机器人学 3.13 机械臂的动能计算及惯性矩阵
机器人学 2.9 使用改进DH通过微分变换法构建雅可比矩阵TJ
我开始质疑世界的真实
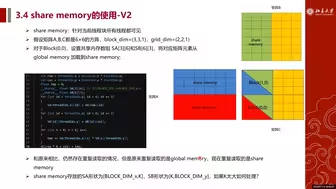
CUDA实现矩阵乘法的8种优化策略编程介绍
机器人学 3.9 牛顿欧拉算法(MDH)的一些例题
机器人学 2.7 雅可比矩阵的微分变换法总述
机器人学 1.4 齐次变换矩阵求逆的引入
机器人学 1.18 标准DH 和 改进DH的区别
机器人学 2.11 使用改进DH建模后用微分变换法求解2R机械臂的雅可比矩阵
机器人学 3.15 拉格朗日动力学(矩阵形式推导)(较难)
机器人学 2.12 使用标准DH建模后用微分变换法求解2R机械臂的雅可比矩阵
机器人学 2.8 使用标准DH通过微分变换法构建雅可比矩阵TJ
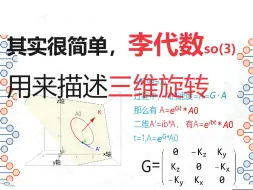
用来描述三维上旋转的李代数so(3),其实很简单
机器人学 2.3 绕通用轴旋转的旋转矩阵
机器人学 2.20 雅可比矩阵的奇异性
机器人学 2.4 非微分绕通用轴旋转的旋转矩阵推导
【杀戮尖塔】总费用为0的卡组要付出什么——一个机器人的独白 【答应我,一定要看到最后好吗?】
机器人学 2.14 矢量积法求解2R机械臂的雅可比矩阵
机器人学 2.17 末端速度递推式求解2R机械臂的速度雅可比矩阵(MDH)
时空矩阵
发那科机器人世界坐标系原点在哪
机器人学 1.8 正逆运动学第一步(Desired Position)的意义
机器人学 2.15 矢量积法求解SCARA机械臂的雅可比矩阵
机器人学 1.12 球型坐标系(Spherical Coodinates)
机器人学 1.22 用改进DH参数建模Aubo机器人