V
主页
京东 11.11 红包
使用DRL的无人机飞行比赛
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
机器人空间感知基础
Distributional reinforcement learning
凸集图及在最优控制和运动规划中应用
边缘AI
高分辨率触觉感知在反应式机器人操作中的应用
冲撞感知操控:利用有意碰撞加速任务执行
可微轨迹优化作为强化和模仿学习的策略表示
机器人中的数值方法
数字实验室做机器人及模拟机器人开发
敏捷自适应四足机器人的分层优化控制
多传感器融合SLAM松耦合与紧耦合
机器人可达性研究
下一代机器人感知:3D场景图,可验证算法,自监督学习
通过学习规划和感知进行任务和运动规划
为什么需要多传感器融合
主动和可解释家用机器人设计
学习野生3D动植物视觉感知
Stanford CS149 并行计算,Hardware Specialization 18
为什么需要建立机器人学徒但不单独做?
通用医学图像分割
Stanford EE259:LiDAR工作原理
机器人学习中运动表示
物理视角看GNN
通过第一人称视频进行机器人学习
新型无人机正改变游戏规则
EI Seminar:如何打造通用机器人
自下而上的视觉学习
可扩展且高效的大模型系统
[NSDI2023] Tambur: 通过流式编码对视频会议进行高效损失修复
Contact-Implicit MPC四足机器人双足倒立与行走
基于事件相机的高效,数据驱动感知
【基于深度强化学习的冠军级别无人机竞速】强化学习和模型预测控制MPC中英字幕18讲!
Flying robots
K8S在边缘端用于AI模型部署的演示
迈向机器人多智能体系统中大规模合作学习
通过扩散策略进行机器人灵活操作
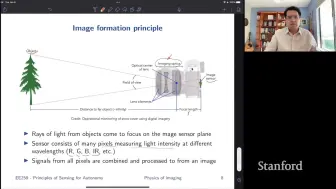
Stanford EE259:镜头、图像传感器、图像信号处理
家庭通用机器人
基于自主视觉的无人机达到人类水平
SIGIR 2024,信息检索发展历程