V
主页
京东 11.11 红包
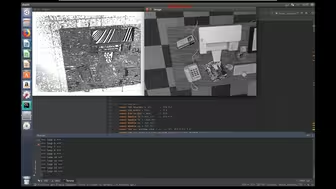
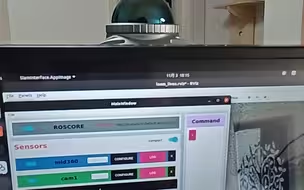
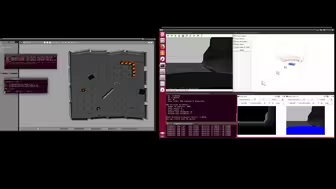
利用搭载在ROS移动机器人上的RGB-D相机在走廊环境实现三维稠密重建
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
基于ORB-SLAM2的室内稠密重建
orbbec astra pro 在实际环境下运行稠密ORB-SLAM2
尝试使用Kinect-2.0复现Rtabmap实现室内场景三维稠密重建
计算机视觉课程
复现视觉SLAM十四讲里的单目深度估计
室内环境稠密点云建图
用普通的USB单目摄像头尝试运行ORB-SLAM2
分享一下如何制作数据集并用在视觉SLAM算法上
复现视觉SLAM十四讲里的视觉里程计VO
使用orbbec astra pro相机在实际环境运行ORB-SLAM2
稠密建图
GCN-SLAM(左)与ORB-SLAM2(右)在快速运动时的tracking性能比较
三维空间扫描仪 高效率重建古建筑
ORB-SLAM2的双目模式(左)和ORB-SLAM3的双目+IMU模式(右)在EuRoC-V101序列下运行对比
RGB-D相机的深度数据转化激光数据进行gmapping建图测试
ORB-SLAM3和ORB-SLAM2的对比
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
IROS'24开源 | 全新动态V3D-SLAM:3D语义几何投票的动态鲁棒RGB-D SLAM
GCN-SLAM与ORB-SLAM2在TUM RGB-D数据集中fr3_long_office序列的对比demo
铰接式车辆的运动规划
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
火星上的SLAM 非结构环境中的飞行器建图和定位 太空机器人
感受一下亚瑟士复古慢跑Asics gel saga的缓震效果
fr3-long-office-rgbdslamv2-siftgpu
感受一下亚瑟士复古慢跑Asics gel lyte v的缓震科技
计算机视觉2
计算机视觉1
浙大章国锋团队最新NIS-SLAM:突破神经隐式语义RGB-D SLAM的极限!
fr3-long-office-rgbdslamv2-orb
【开源】百元价格就能实现学习ROS和SLAM导航的口袋式桌面机器人!
感受一下迪亚多纳复古慢跑diadora v7000 三方联名的缓震效果
【乒乓球】和师弟日常练习(单点攻防)
多摄像头多地图视觉惯性定位系统 (VILO):实时精准定位方案
要啥激光雷达,2D、2.5D、3D地图我全都有,Factor Perception SDK纯视觉SLAM地图数据展示
尝试利用TUM数据集运行基于特征点法的ORB-SLAM2实现帧间运动估计
千元级手持slam真彩点云
slam多功能救援无人机
马斯克特斯拉机器人的最新视频和技术解析
在Gazebo仿真环境下运行ORB-SLAM2