V
主页
基于自抗扰ADRC控制的四旋翼无人机飞行姿态仿真模型【参考文献搭建】
发布人
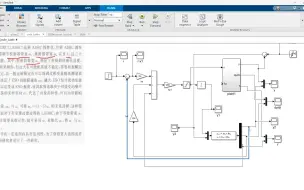
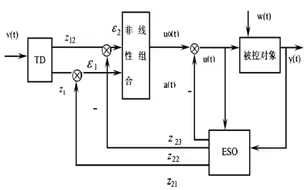
基于自抗扰ADRC控制的四旋翼无人机飞行姿态仿真模型【附参考文献】 (1)将二阶自抗扰控制器应用于四旋翼无人机中可以提高控制精度及跟踪性能,并且具有强鲁棒性、抗干扰性能。 (2)自抗扰控制器:跟踪微分器、扩张状态观测器以及非线性状态误差反馈律 (3)仿真内容:包括无人机姿态模型,力矩方程,角运动方程,其中还包含三个姿态角的数学模型,以及三个ADRC控制器 参考文献:《自抗扰技术在四旋翼飞行姿态控制中的应用》附带参考文献结合仿真学习 仿真结果:表明,在ADRC控制下,系统能够很好的跟踪期望值具有较强的鲁棒性。
打开封面
下载高清视频
观看高清视频
视频下载器
10分钟,学会使用ladrc,simulink仿真
二阶非线性ADRC自抗扰控制仿真【有调参说明】
自抗扰控制器(ADRC)学习笔记
ADRC vs PID 四轴控制
【手把手带你做实验第4期】基于Simulink四旋翼无人机PID控制——四旋翼无人机定高控制
基于自抗扰ADRC控制的四旋翼飞行姿态控制模型
基于自抗扰ADRC和PID控制对比的四旋翼姿态角和位置轨迹跟踪模型
SPI加DMA与不加DMA的区别
卡尔曼滤波器的C语言实践教程
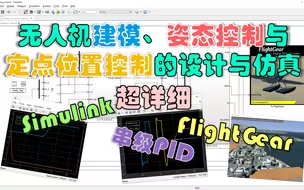
学习总结|四旋翼无人机建模、姿态控制、定点位置控制的设计与仿真
基于ADRC姿态控制的四旋翼无人机仿真模型
ADC0832电池剩余电量检测,采用AD中值滤波算法采样,Proteus仿真
学习心得|基于卡尔曼滤波的MPU6050姿态解算
控制器封装库(八)自抗扰ADRC控制器和调参规律
ADC采样总是有偏差?
改进神经网络自抗扰控制(RBF-ADRC)的永磁同步电机(PMSM)仿真模型
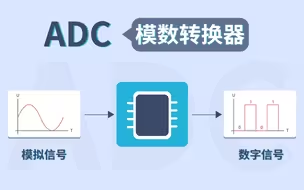
ADC——模数转换器的基础知识和几个常见类型
四旋翼无人机ADRC与PID轨迹跟踪姿态控制对比
【软核】卡尔曼滤波,不废话
【开源课程】10分钟了解卡尔曼滤波算法(附赠一个开源小项目)
【卡尔曼滤波】深入浅出讲解卡尔曼滤波原理,看完我惊呆了!
mpu6050三种常见滤波方法的对比|卡尔曼滤波、一阶互补滤波、四元数法
不要RC低通滤波直接ADC采样
嵌入式开发面试题GPIO的输出什么时候用开漏什么时候用推挽
不要RC低通滤波直接ADC采样!
简单的均值滤波讲解(附代码)
这程序复现的太优雅了!四旋翼无人机姿态系统复合连续快速非奇异终端滑模控制
平滑滤波算法演示
从放弃到精通!卡尔曼滤波从理论到实践~
卡尔曼滤波器的C语言实现教程
第61期-ADC模数转换-ADC滤波算法:限幅滤波、中位值滤波、算数平均滤波-STC32G12K128系列视频
卡尔曼滤波实战之教你如何套用进自己的项目
卡尔曼滤波示例
十行代码实现SVPWM
stm32的十种常用的滤波算法程序
各类滤波算法,需要的朋友点个关注吧,链接放放简介里了
本来还挺喜欢PWM的
单片机 --- 数字滤波算法
1-8ADC滤波与实际电压换算
ADC转换的滤波问题分析