V
主页
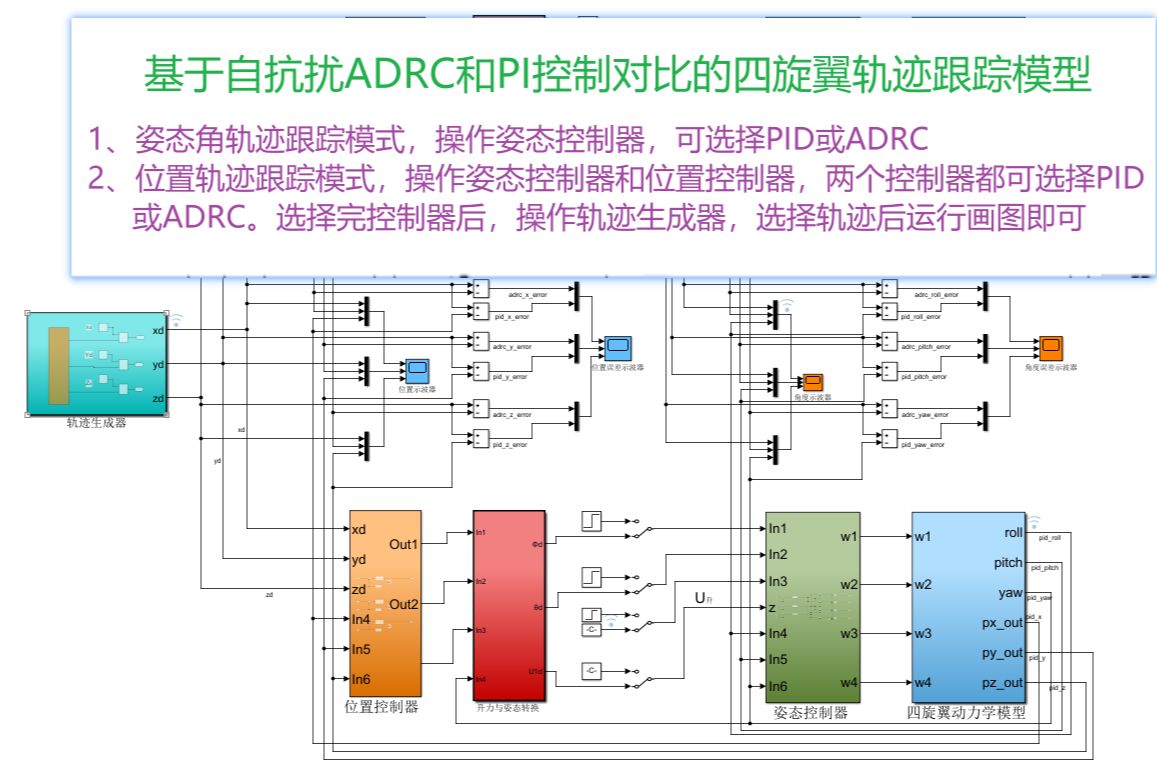
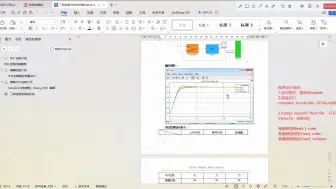
基于自抗扰ADRC和PID控制对比的四旋翼姿态角和位置轨迹跟踪模型
发布人
基于自抗扰ADRC和PID控制对比的四旋翼轨迹跟踪模型 1、姿态角轨迹跟踪模式,操作姿态控制器,可选择PID或ADRC 2、位置轨迹跟踪模式,操作姿态控制器和位置控制器,两个控制器都可选择PID 或ADRC。选择完控制器后,操作轨迹生成器,选择轨迹后运行画图即可
打开封面
下载高清视频
观看高清视频
视频下载器
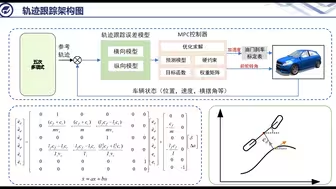
自动驾驶模型预测控制轨迹跟踪
基于自抗扰ADRC控制的四旋翼飞行姿态控制模型
顶刊 TNNLS 复现:基于强化学习的机械臂固定时间轨迹跟踪控制
基于反步法or滑膜控制orPID控制的四旋翼无人机轨迹跟踪模型
基于 S 函数的 BP 神经网络 PID
【圆形轨迹】基于模型预测控制(MPC)四旋翼飞行器(UAV)跟随控制
PID控制、模糊控制、模糊PID控制simulink仿真对比(程序+报告)
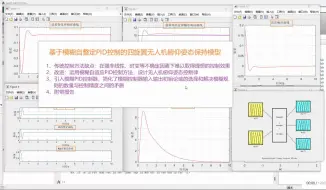
基于模糊自整定PID控制的四旋翼无人机俯仰姿态保持模型
MPC横纵向控制
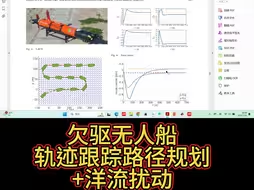
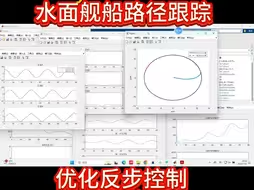
【顶刊复现】欠驱无人船轨迹跟踪+洋流扰动
顶刊:无人船轨迹跟踪 优化反步控制 强化学习 Actor-critic算法
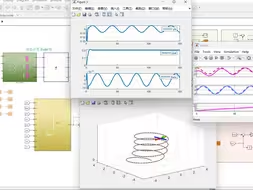
PID控制四旋翼轨迹跟踪含三维图像模型
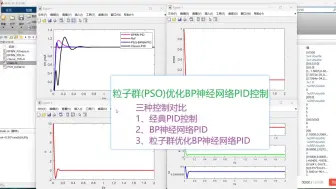
粒子群(PSO)优化BP神经网络PID控制
PID其实很简单
【一区论文复现】自适应强化学习机械臂控制
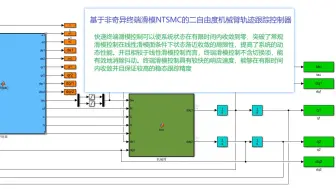
基于非奇异终端滑模NTSMC的二自由度机械臂轨迹跟踪控制器
输入受限约束下基于NMPC的四旋翼轨迹跟踪控制
基于自抗扰(ADRC)控制和eso扩张状态观测器永磁同步电机无位置传感器仿真
cartographer 2d 全局线段规划器 + MPC 轨迹跟踪 仿真demo
双足机器人isaacgym训练后sim2sim到mujoco扭成麻花了
基于MATLAB机械臂自适应模糊滑模控制仿真多种控制比较
相信吗?新手也能5分钟写出PID和卡尔曼滤波代码
改进的变步长扰动观察法光伏MPPT最大功率跟踪(含小步长和大步长对比)
基于自抗扰控制(ADRC)和有限集模型预测(FCS-MPC)的永磁同步电机模型
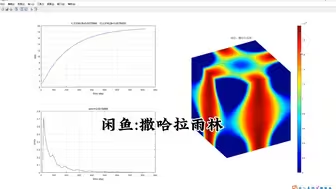
LBM三维多孔介质渗流 波尔玻尔兹曼 D3q19 渗透率
[个人中字]使用simulink搭建车辆模型——Matlab&Simulink Racing Lounge
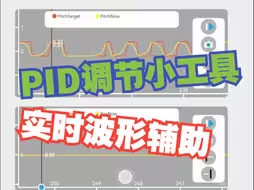
PID调试小工具
二自由度机器人迭代学习PD型控制
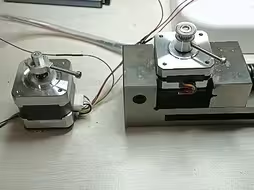
步进电机位置跟随模式
基于LADRC自抗扰控制的VSG三相逆变器预同步并网控制电压电流双闭环控制
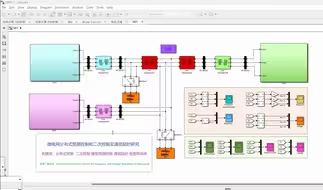
【一区论文复现】微电网分布式预测控制和二次控制及通信延时研究
2024级研究生入学培训 - 为什么用积分控制?回味无穷的PID控制
基于RBF径向基神经网络自适应调节PID 控制器参数
【复现】光伏并网逆变器接入弱电网的序阻抗建模扫频法与稳定性分析
PID到底怎么调,它们三者有什么关系?
基于立创-天空星stm32f407的foc控制,电流环+位置环效果。pid参数语言再调整才行。
全桥LLC参数计算设计书(Mathcad)(含变压器开关管等器件选型)
【Abaqus从入门到放弃】第十八集:小球冲击复合材料板Hashin损伤
【Abaqus从入门到放弃】第十六集:拉伸样件断裂仿真
【网盘自取】锁相环理论知识分享