V
主页
WBC-based Up & Down Motion in a Single Foot Stance, #2, (23.06.02) (搬)
发布人
https://www.youtube.com/watch?v=cSZ4S8F5M88 [RoK-3] Whole Body Control-based Up & Down Motion in a Single Foot Stance, #2, (23.06.02)
打开封面
下载高清视频
观看高清视频
视频下载器
基于质心动量的人形推动恢复(搬)
Humanoid Balance Control using Centroidal Angular Momentum based on HQP(搬运)
[搬] 稳健的类人机器人行走-通过强化学习增强基于模型的控制
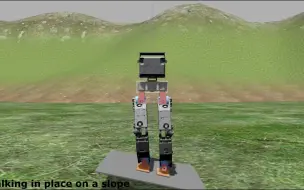
WBC-based Walking in place experiments simulation (搬)
基于可捕获性分析的双足机器人上肢防坠落控制
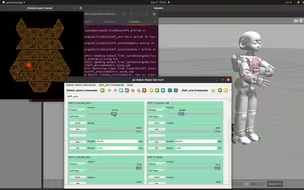
iCub Gazebo - Skin emulation (v2) (搬)
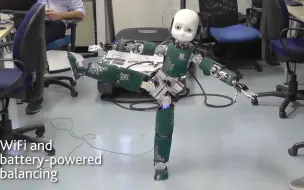
iCub dynamic balancing and walking 2018(搬运)
Vision-Based Terrain-Aware Locomotion for Legged Robots (T-RO) (搬)
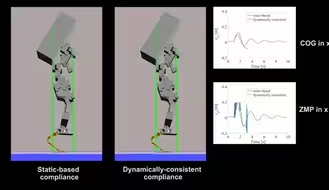
[搬] 基于柔顺性优化的刚软混合系统类人机器人运动控制
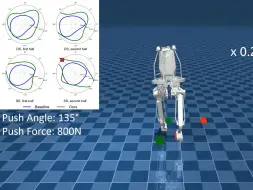
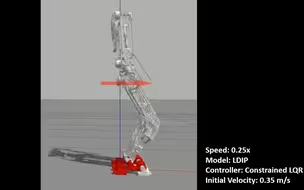
基于线性化双倒立摆的仿人机器人推送恢复 (搬运)
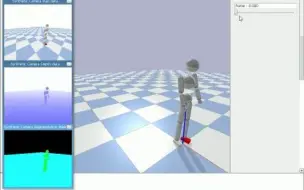
PyBullet 中的人形动作捕捉回放(搬)
青龙openloong 上10cm台阶 上0.2rad斜坡
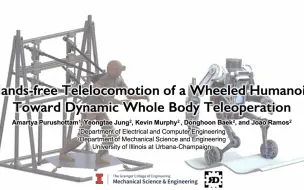
Hands-free telelocomotion of SATYRR (搬运)
给大家看看我新养的狗
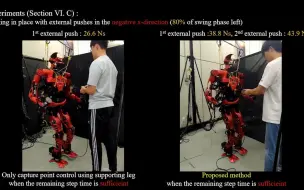
基于捕获点控制的双足支撑时间调整的仿人踏步算法(搬运)
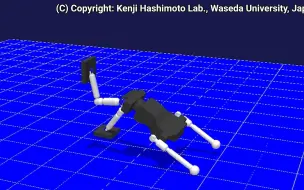
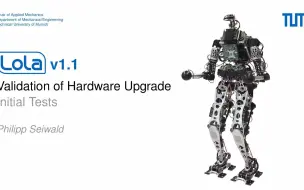
Humanoid Robot LOLA v1.1 - 硬件升级验证 - 初始测试 (搬)
一种骑在两轮移动平台上的力矩控制仿人机器人(搬)
具有分层逆动力学的扭矩控制类人动物的平衡实验 2014(搬运)
Learning-based Localizability Estimation for Robust LiDAR Localization(搬运)
(搬运) Learning to Walk and Fly with Adversarial Motion Priors (IROS 2024)
TALOS人形机器人的ICP定位和行走实验(搬)
Scara 机器人工作空间(Robot WorkSpace)
通过运动重定向学习控制人形机器人的任务优先级和收益(搬)
从人类到仿人机器人的稳健实时全身运动重定向 - 快速且具有挑战性(搬)
[搬] 利用实时非线性 MPC 的双足运动Seamless反应策略
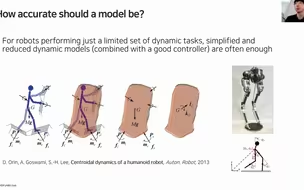
Taeyoon Lee 基于动态模型的机器人的几何方法(搬)
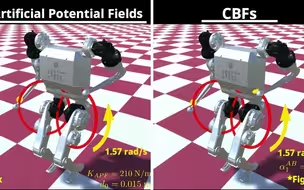
使用具有控制屏障功能的全身控制的人形自碰撞避免(搬)
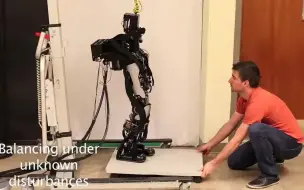
SUBO 2 Upgrade Balance Control & Disturbance Test (搬运)
Forces & Torques of a robot (part 2) _ Robotics 101(搬)
使用惯性信息估计有腿机器人的概率接触状态(搬运)
[搬] 高比率谐波传动摩擦建模的物理知识学习 (机翻)
ROS bullet sim tracked vehicle(搬)
复杂的机器人系统:使用对偶四元数代数建模、控制和规划
[搬] 通过 3D SLIP+足部动力学实现高度机动的人形跑步
8万元的双足机器人,走路姿势“不正经”
AT-ST Walker Agent Demo _ Unity ML-Agents
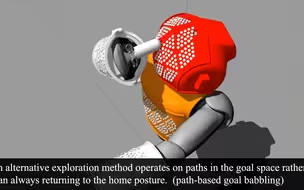
通过对人形机器人的自我触摸进行身体模型学习的目标导向触觉探索(搬)
THOR Push Recovery Jan 27, 2014(搬运)
Enhanced Balance for Legged Robots Using Reaction Wheels (搬运)
[搬] 具有闭合/并行运动链的人形机器人的全身控制:袋鼠案例研究