V
主页
京东 11.11 红包
【三维重建】DRAGON: Drone and Ground GaussianSplatting for 3D Building Reconstruction
发布人
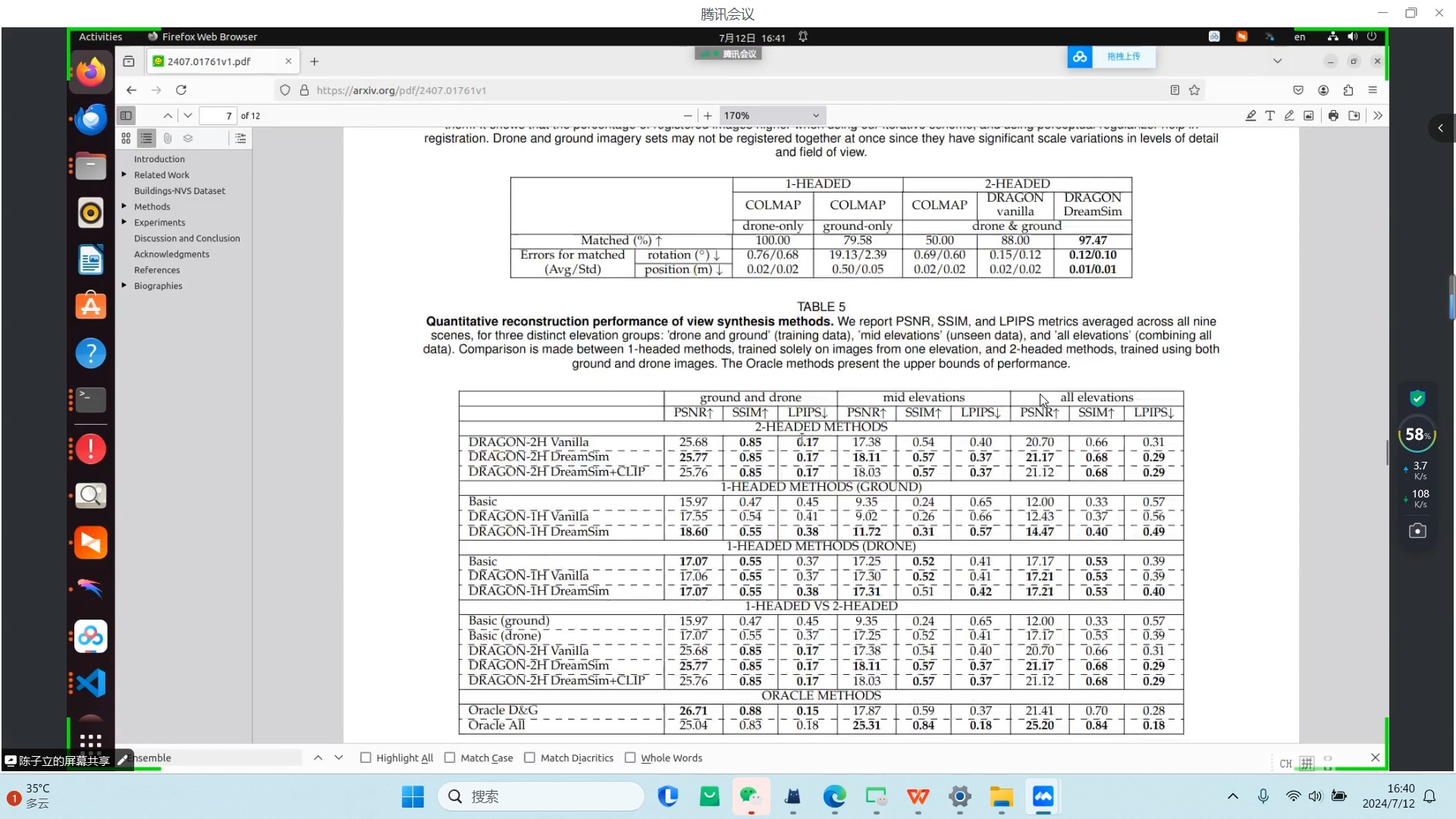
从成像数据中重建三维建筑物是一项重要任务,适用于从城市规划到侦察等许多应用领域。NeRF 和高斯拼接等现代新视图合成(NVS)方法为以无监督方式从自然二维图像中开发三维模型提供了强大的技术。这些算法通常需要输入相关场景周围的训练视图,而在大型建筑物的情况下,通常无法获得所有摄像机仰角的训练视图。特别是,在大多数建筑物中,最容易获得的摄像机视点是近地(如手机)和空中(无人机)视点。然而,由于无人机和地面图像集在视角上存在显著差异,NVS 算法的必要步骤--相机注册--就会失败。在这项工作中,我们提出了一种名为 DRAGON 的方法,它可以将无人机和地面建筑图像作为输入,并生成三维 NVS 模型。DRAGON 的关键之处在于,NVS 算法本身可以通过感知正则化迭代程序外推中间高程图像,从而弥合两个高程之间的视觉特征差距并实现注册。我们使用 Google Earth Studio 编制了一个包含 9 个大型建筑场景的半合成数据集,并从定量和定性的角度证明,与基准策略相比,DRAGON 可以在该数据集上生成令人信服的渲染效果。
打开封面
下载高清视频
观看高清视频
视频下载器
【稀疏三维重建】Flash3D:单张图像重建场景的GaussianSplitting
【稀疏三维重建】pixelSplats:只需两张图的可扩展三维重建
【三维重建】动态场景和高质量表面的Gaussian Splatting
【三维重建】Robust 3D GS:对模糊性进行建模的三维高斯重建方法
【三维GS配准】GaussReg:利用GS进行3D配准的创新性粗到精框架
【三维重建】使用高斯表面元( Surfels) 高质量重建表面
【三维重建】大场景的分层3D GS重建
【三维重建】Robust 3D GS:对模糊性进行建模的三维高斯重建方法(未变声版)
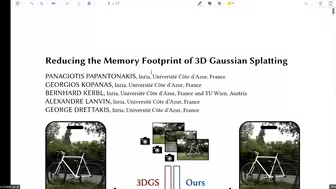
【三维重建】Reducing the Memory Footprint of 3D Gaussian Splatting(3D GS的加速与优化)
【三维AIGC】GSD:从单张视图中重建3DGS的扩散模型
VTK+Qt+PCL+VS显示点云 点云处理 PCL点云库VTK三维重建 PCL 点云 点云处理
【三维重建汇总】NeRF和GS重建中,如何排除干扰物?(RobustNeRF、PixelGS等论文汇总)
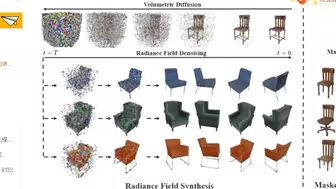
NeurlPS'24开源 | GaussianCube 一种用于三维生成建模的结构化和 显式辐射表示,引领三维重建新范式
【3D点云+三维重建】最好出论文的研究方向,博导带你从零解读两大方向的核心算法PointNet与NeuralRecon!赶紧收藏
【法线估计】StableNormal:基于扩散模型的由粗到细的法线估计方法
这也太全了!迪哥手把手带你入门【3D点云+三维重建】实战,从原理解析到项目实战 -NeuralRecon/PointNet
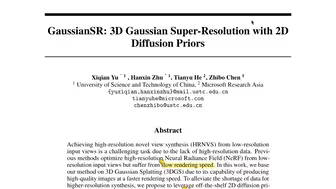
【三维重建】GaussianSR-2D扩散先验的三维高斯超分
【三维重建】ExtraNeRF:基于扩散模型,对NeRF进行外延
【三维重建】2DGS:2D Gaussian Splatting的几何辐射场
【三维场景展示】3室内博物馆(UE+NeRF/GS技术)
终于有人把三维点云与三维重建讲得如此简单了!算法解读、项目实战、论文解读、环境配置
【完整版3D点云】学不会UP下跪!这是绝对是我看过最强的三维点云+三维重建实战教程!点云算法与NeuralRecon配置解读 计算机博士一次性给我教明白了!
【三维编辑】Gaussian Grouping与GaussianEditor:基于GS的三维编辑与修复(原理讲解)
【三维场景展示】1原始森林(UE+NeRF/GS技术)
【三维重建】photoslam:一种基于超源语的高保真SLAM框架
【三维重建】pixelGS:像素控制密度的3DGS高斯喷溅
【动态场景重建】《deformable 3D Gaussian Splatting》与《4D Gaussian Splatting》原理讲解(CVPR2024)
Text-to-3D、Image-to-3D等三维生成方法(EG3D、DiffRFL、ZeroRF、SSDNeRF等原理解读)
【三维重建】IROS 2024论文解读MonoPlane单目几何知识引导的可泛化三维平面重建
【三维重建】china3dv大会-大规模动态场景的重建与渲染
3D Gaussian splatting 结合雷达点云重建
AI新作 | 大模型增强稀疏3D重建
【NeRF】【自监督学习】NeRF-MAE:NerfStudio组联合TOYOTA推出的三维自监督预训练大模型
【三维重建】Sparse_NeRF:只需三张图就能重建三维场景(代码讲解)
多视图三维重建技术发展
【三维场景展示】2大佛峡谷(UE+NeRF/GS技术)
巧借阿氏圆,妙解立体几何最值问题
【三维重建】spotlessSplats:能忽略移动物体干扰的3DGS场景重建!
【深度估计】Doubletake:从RGB图像序列,基于短期和长期的几何信息进行深度估计
油管爆火の三维目标跟踪(含开源代码)_科研圈大佬亲讲【完整版3D点云】!