V
主页
深度相机的性能评估
发布人
深度相机的生产公司很多、产品种类很多,如何选择最合适的产品?这里提出了两个性能指标,设计了指标的估计方法,提出了一个尚未解决的问题——物体识别
打开封面
下载高清视频
观看高清视频
视频下载器
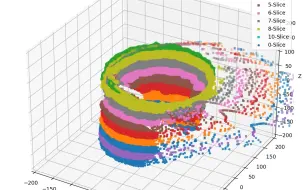
采用3D深度相机和切片方法测量人体体积
使用3D相机对定位精度指标进行自动数据采集和评估
在“多机器人-多资源-多任务”场景下资源分配问题的构建方法
静态特征结构光相机的3D定位方法简介
多智能体系统一致性介绍-1-代数图论基础
多智能体系统一致性基础-11-一阶时间离散动力系统的一致性2
【16集全】刚好适合B站大学生看的英语动画短片,学习完一个月词汇量突飞猛进,沉浸式英语学习提升,多个高质量英文动画快速提升词汇量、口语、听力,刷完词汇量暴涨
多智能体系统一致性基础-6-系统一致性定义
大规模机器人集群的分布式控制方法-1-机器人群体的行动策略制定和应用介绍
动态屏蔽板分配的背景介绍
气体污染物扩散的思考记录
分布式资源分配在机器人集群中的应用动机讨论
回环检测在点云配准问题中的初步尝试
2D视觉机器人的手眼标定流程记录
点云配准的ICP算法测试
在C:MO兵棋推演游戏背景下的单装备多目标打击问题-方法1-问题构造
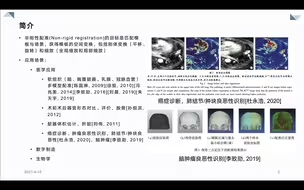
3D点云非刚性配准(Non-rigid Registration)的简要介绍
遗传算法NSGA-2的基本计算流程讨论
一点想法-观测与事实
福岛核事故后放射性碘的大气扩散问题记录
3D视觉机器人中手眼标定的精度提升方法记录
【刘旸教主英语全398集】刘旸卷王讲高中英语更新啦!这是我见过最完整的刘旸英语系统课!逼自己一周学完,英语小白快速进阶到大神!考前肝完,提升英语不再走弯路!
两期跨期均衡下的拉格朗日乘子法求解记录
Blender几何节点中文字典首发!!
多智能体系统一致性基础-8-单积分器动力学的一致性2-Consensus Leaders and the Kronecker product
使用PCL(Point Cloud Library)生成点云和保存PCD点云文件
多智能体系统一致性基础-2-强连接图特性讨论
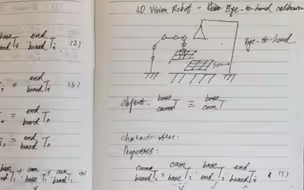
3D视觉机器人的手眼标定流程记录
城市灾难救援下的预算与设备分配
防护板的动态分配方法记录
瓦尔拉斯需求函数的求解记录
你排版时为啥总是没有思路?
Nabla算符的理解记录
凸优化梯度下降法简单讨论
针对小车车故障的系统可靠性分析简介
分布式机器人集群的初步讨论
神经网络的简单讨论-简单神经元模型
KNN(K近邻)算法的原理介绍
3D Sensing Robot and Random Bin Picking