V
主页
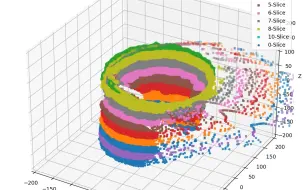
静态特征结构光相机的3D定位方法简介
发布人
简要记录一下3d结构光相机的定位方法,这里记录的是静态特征的结构光相机
打开封面
下载高清视频
观看高清视频
视频下载器
采用3D深度相机和切片方法测量人体体积
如果收藏的视频失效了,可以用这个方法查看封面,从而回忆起曾经收藏的是什么
使用3D相机对定位精度指标进行自动数据采集和评估
【up自测】9月最新百度网盘不限速下载方法!最高突破100MB/S,度盘不限速让你轻松下载网盘资源,最新不限速下载!
深度相机的性能评估
点云配准的ICP算法测试
“教师编面试现场堪比刺激战场”,尤其是语文面试简直是在选拔最佳演员...
在“多机器人-多资源-多任务”场景下资源分配问题的构建方法
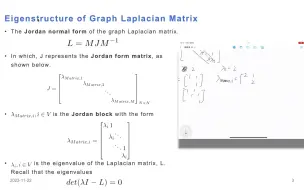
多智能体系统一致性介绍-1-代数图论基础
9月最新百度网盘双端不限速下载方法!最高突破100MB/s!无需会员!满速下载!
三无大学生简历给大家参考
使用PCL(Point Cloud Library)生成点云和保存PCD点云文件
县级市局长都在偷偷上岸?而你还在吃饭、睡觉、躺板板!奉劝各位尽早备考......
Nabla算符的理解记录
KNN(K近邻)算法的原理介绍
视觉导航的ICP算法效果
控制考研禁用计算器?不用计算器解题方法|自控专业课手算技巧
有点恶心,但是一周可以拿5个大模型岗offer
防护板的动态分配方法记录
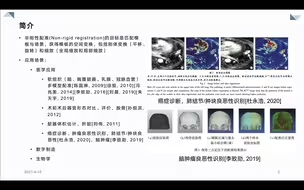
3D点云非刚性配准(Non-rigid Registration)的简要介绍
一个简单的离群点检测方法
在PCL(Point Cloud Library,点云库)下导入PLY和OBJ格式文件
大规模机器人集群的分布式控制方法-1-机器人群体的行动策略制定和应用介绍
华科光电国奖|连续三年国奖的答辩经验分享
气体污染物扩散的思考记录
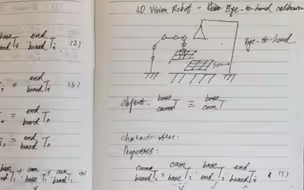
3D视觉机器人中手眼标定的精度提升方法记录
CERN ROOT使用教程-1-CERN ROOT简单介绍
雅思9分阅读法丨轻松搞定考点句定位,1小时速成,听完必涨分!雅思阅读
一战上岸985的顶级心态|可实践方法论|心态修炼|考研方法
多智能体系统一致性基础-4-图矩阵基础2
3D视觉机器人的手眼标定流程记录
HR最反感的简历长什么样?
一个方法让你快速冷静下来!
通宵做复制粘贴,2个月到手58960!收藏好这18个网站,你也可以做到!!
多智能体系统一致性基础-11-一阶时间离散动力系统的一致性2
3D物体识别中提升效率的方法记录
25国考即将报名,提前看!全流程及注意事项,手把手教你,真的简单,照着填不会出错!