V
主页
巡检动态避障仿真
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
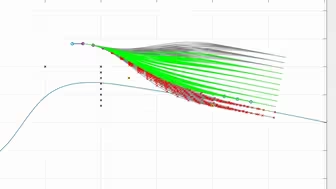
基于B样条和改进A*的避障
涵洞巡检-松灵高防护履带式移动底盘与一体化导航方案
ROS机器人自动驾驶,自主导航巡检车可作为高校车辆工程、智慧交通、自动化等多专业的实践教学工具
大鹅安保巡逻机器人,北京算丰征途科技有限公司#工厂巡检机器人 #大鹅巡逻机器人 #算丰征途
[厉不厉害你机哥]ROBOCUP-国一客户案例-移动靶投放-Phoenix330科研竞赛无人机
基于ros路径规划+避障演示
乘用车侧方位停车
宇树K1机械臂的视觉抓取仿真
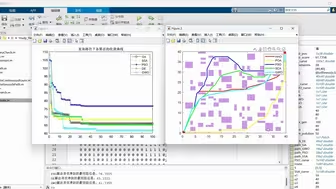
五种经典算法优化机器人路径规划【粒子群-遗传-灰狼-麻雀优化-差分进化】
【人形机器人】在Gazebo/Mujoco中的仿真
基于stm32的四驱智能小车遥控寻迹避障(源码+原理图)
五子棋分拣–法奥协作机械臂FR3 ROS MoveIt-数字孪生
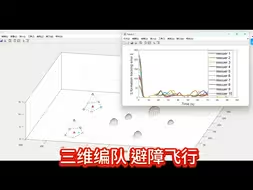
多智能体三维编队 避障飞行
2025工创赛物流搬运机器人 如何码垛 如何启动 注意什么??
基于Q-learning求解机器人路径规划问题
基于yolo和moveit的图像识别机械臂目标抓取搬移
自定义3d点云构建2d地图算法
跟着大佬25个小时吃透【无人驾驶技术】全套教程,一口气学完感知实战、视觉定位、路径规划、高精地图与车路协同、预测系统,技能点拉满!!!(自动驾驶/人工智能AI)
C6-2智能车的建图与自主实现教程
2025工创赛物流搬运机器人 赛事解读与问题分析2
【开源无人机】Ego-Planner参数讲解
ROS机器人基于gmapping的slam自动导航建图!
2025年工创赛 物流搬运机器人 全流程调试
基于搭建的仿真Livox mid360雷达与仿真环境实现LeGO-LOAM
给循迹优化了一下,添加一点难度!
我回来了-软路由RouterOS防火墙规则之“流量转发指定接口”
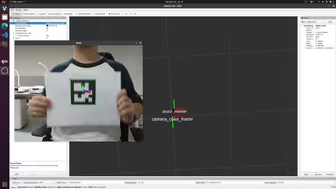
【考核用】调用opencv识别aruco码,在ros中更新tf
Lattice路径规划
241一分钟搞定定义障碍物和起止点坐标的Dijkstra 算法路径规划
【开源无人机】Vins_fusion代码讲解
调车总不能炸机了吧(●'◡'●)
移动机器人自主路径规划
使用相机在ROS下的TensorRT量化推理yolo模型以及使用BYTEtrack算法进行目标跟踪部分的更新
仅需一步,瞬间提升树莓派5的AI算力,化身性能猛兽!
ROS2 路径规划和计算机视觉迷宫求解
STM32寻迹+测速+避障+蓝牙+红外+电压监测智能小车
图睿轮式人形机器人 | 销售电话18268017403
purepursuit差速机器人路径跟踪
[竞赛直击]中国机器人及人工智能微型无人机-国一客户案例-Phoenix330
基于ROS双臂协同的智能物流搬运系统