V
主页
京.东618红包,每天可领3次
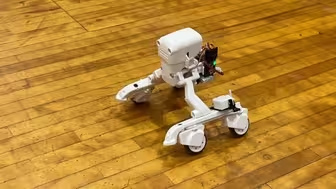
开源四足机器人SOLO12测试蜘蛛爬行模式
发布人
原视频:https://www.youtube.com/shorts/v6Ui8MtUzRg
打开封面
下载高清视频
观看高清视频
视频下载器
轮足四足机器人 移动性的未来
ESP32超低成本四足机器人 30元成本
robocon 2019南部赛区 武大四足
你怎么知道我也有全向轮底盘了
哈工程ROBOCON2023马术四足机器人
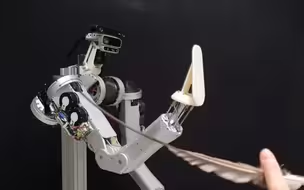
无刷腿设计欣赏
这种机器人可有人见过,好神奇!
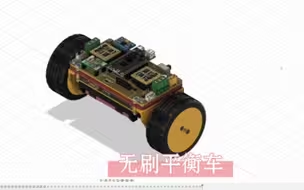
【开源啦!】无刷轮腿平衡机器人
Solo-12 的反应行走控制器
开源了一个可以拯救普通狗子的代码
给浙大控制机械狗宣传一下~
【云深处科技】绝影lite3初次见面!能跳!
【搬】逆运动学效果很好!
【搬】Stanley无刷狗起跳慢动作
2017年,开局一条狗
【开源】超低成本力控机械臂--达妙!还是达妙!
全新坐骑
LAAS 的 Solo12 户外实验,自主更新
四足轮式会飞的机器人
队伍的第一辆平衡步兵,队长笑开了花
2015年5月美国麻省理工学院研制的猎豹II成为世界上第一个可以在跑动中自动跳跃障碍物的四足仿生机器人
开源机器狗SOLO12通过强化学习学会各种行走技能
仿生肌肉骨骼软四足机器人的慢动作自适应行走
环哪个洋?|西安交通大学工程机器人自定义控制器
小电控轮滑机器人
Robocon2019-武大四足机器人日常联调
轮腿式救援机器人
3D打印机器人车身控制
机器人Nadia与人切磋拳击
分享一种不用谐波不用力传感器但又可以相对精确力控的人形机器人手臂思路…
一个正在找融资的创业团队搞的带四轮转向与悬架的AGV…
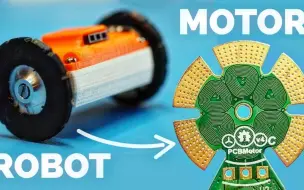
爱搞PCB电机的小哥又整活了,用2个PCB无刷电机做了个迷你小车
监控机器狗
波士顿动力公司机器人进化史
【钛创客】最新视频已上线,快来围观!
极为落后,在线丢人
自主研发的人形机器人-下肢终于要落地啦!
轮腿机器人的新技能:鲤鱼打挺
制作无刷轮毂电机
固态电容VS电解电容,性能对比测试