V
主页
LAAS 的 Solo12 户外实验,自主更新
发布人
https://www.youtube.com/watch?v=kGpJpMjCQcA GitHub 硬件文档:https://github.com/open-dynamic-robot-initiative/open_robot_actuator_hardware/blob/master/mechanics/quadruped_robot_12dof_v1/README.md#quadruped-robot-12dof-v1
打开封面
下载高清视频
观看高清视频
视频下载器
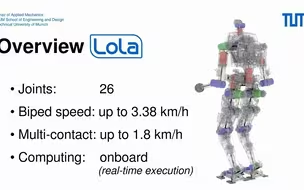
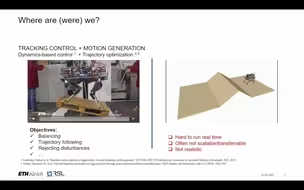
【搬】人形机器人 LOLA - 自主多接触运动的行走模式生成
Solo12 的首次无线测试,WiFi + 电池更新
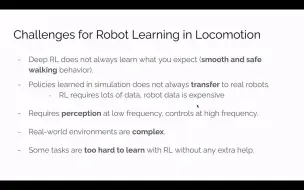
四足机器人跌落姿态调整 基于强化学习的机器人控制
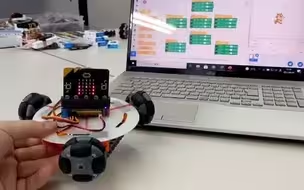
外国小哥哥做的开源12自由度舵狗仿真欣赏
[ ETH RSL ] mANYpulator – 移动操纵 (Martin Wermelinger)
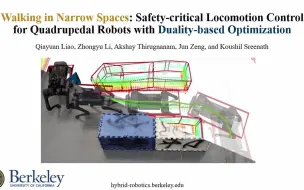
【搬】在狭窄空间行走 NMPC DCBF 对偶性
超雄机器人
【搬】使用强化学习创建动态四足机器人守门员
KAIST猎犬,四足机器人100米世界纪录
新西红柿狗腿子四足之【ps3手柄蓝牙无线连接・Wi-Fi通信测试】
再调几天就开源-纯mpc-matlab代码很适合大家入门
PACC:使用 MPC 的四足机器人高负载协作搬运被动臂方法
3D打印机器人执行器组件,在这个视频中,我展示了为我的四足机器人设计的机器人执行器的完整组装
Talk 04_ W. Xingxing, Unitree Robotics _ ICRA2021 WS on Legged Robots
电液肌肉单腿机器人 灵活的腿 轻巧的腿
【搬】机构欣赏
Real-time Mapping of Industrial Structures with the Spot Quadruped Robot
动态变化环境中单足跳跃者的模型预测跑酷控制 代码地址在简介
四足机器人+机械臂
【搬】VILENS:适用于全地形腿式机器人的视觉、惯性、激光雷达和腿部测距仪
强化学习爬楼梯
PiPER:仅售 2,499 美元 AgileX 的下一代轻型机械臂!
legged control 成功部署在A1
Gerardo Bledt(麻省理工学院):推广和改进腿式机器人的正则化预测控制
高效可锁定弹簧踝(ELSA)假体
云深处科技携手昆泰芯微电子打造高性能四足机器人
用于核环境表征的自主分布式3D辐射场估计
Joonho Lee_ 在充满挑战的地形上学习四足运动
[V-Sido] MR游戏/智能手机与Wild Liger联合操作
【搬】基于图的多传感器融合的自主建筑机器人定位(讲座)
全向小车
Atil Iscen_ Learning Legged Locomotion
西交恐怖机器狗珍贵跳跃画面
【搬】带尾巴的双足机器人自调步态
Talk 08_ A. Ijspeert, EPFL _ ICRA2021 WS on Legged Robots
装一块20节12安时电池组装!这容量足够用了
摆线齿轮减速学习小结【附学习用的水代码】
SolidWorks快捷键这样设置,效率提升5倍!
十年高工带你5分钟搞懂常见旋转机构及其对比!
EEVblog 1530 - 鼎阳SDS2000X HD 12位示波器拆机