V
主页
京东 11.11 红包
【论文分享】移动机械臂协同控制(一) —— 机械臂反应式控制
发布人
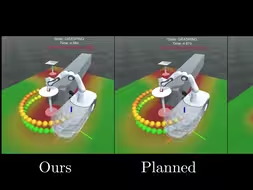
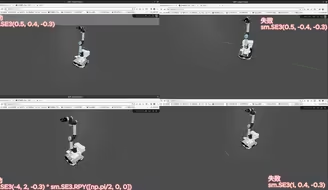
论文标题:《A Purely-Reactive Manipulability-Maximising Motion Controller》 相关网页:https://jhavl.github.io/mmc/ 研究团队:昆士兰科技大学机器人中心(QCR) 会议:2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 作者:Jesse Haviland;Peter Corke 年份:2022 摘要:我们提出了一种控制机器人末端执行器瞬时速度的新方法,该方法能够同时最大化可操作性并避免关节限制。它在非冗余和冗余机器人上操作,这是通过以受控路径偏差的形式添加人工冗余来实现的。我们将问题公式化为二次规划,并提供了一个开源Python实现,可以在短短一毫秒内提供解决方案。它接受使用URDF或DenavitHartenberg参数化表示的机器人模型。我们将我们的方法与以前在模拟和物理机器人上的工作进行了比较。
打开封面
下载高清视频
观看高清视频
视频下载器
【论文复现】移动机械臂协同控制(二)——机械臂动态避障
【论文分享】移动机械臂协同控制(三)—— 机械臂+移动底盘实现车臂协同控制
【论文复现】移动机械臂协同控制(三)——UR5e实物控制
【论文分享】移动机械臂协同控制(五) —— 移动机械臂任务失败恢复
【论文分享】移动机械臂协同控制(二)—— 机械臂反应式控制 + 动态避障
【论文复现】移动机械臂协同控制(十) Gazebo无重力补偿
【论文分享】移动机械臂协同控制(四)—— 移动机械臂抓取动态物体
【论文分享】移动机械臂协同控制(六) —— 移动机械臂全身动态避障+任务失败恢复
【论文复现】移动机械臂协同控制(八)——在Gazebo上实现UR5e_Tracer_Robot控制
【论文复现】移动机械臂协同控制(五)——UR5e_Tracer_Robot病态到达姿势
【论文复现】移动机械臂协同控制(四)——UR5e_Tracer_Robot协同控制
【论文复现】移动机械臂协同控制(六)——UR5e_Tracer轨迹跟踪
【论文复现】移动机械臂协同控制(九) ——Gazebo上实现UR5e反应式控制
【论文复现】移动机械臂协同控制(七)——UR5e_Tracer_robot实物控制
机械臂第一步——摆拍!
Ros2控制6轴机械臂
如何用706.9元做一个高精度的机械臂?
开源超低成本谐波减速,文件分享在评论区。
【开源教程】ROS+PX4开源机械臂控制(下)
Dobb·E 一个开源的家庭机器人操作臂端到端学习训练框架
机械臂运用起来了吗?| 智慧搬运侠 || 2023国际青年人工智能大赛
机械臂开源-3D打印的机械臂快撑不了要散架了!-Moveit调包没有含金量
今天把我做的这个机械臂开源
给机械臂换了一个手,一个字好用
蜡像手办机器人
机械臂代码讲解-02
手搓Aloha机械臂训练
协同形态与反馈控制用于空中机器人穿越未知的柔性障碍物 | 2024 苏黎世联邦理工学院
把我机械臂用到的谐波减速器分享给大家
第一次玩机械臂
遥操作孪生协作臂
3D打印的机械臂优化后不抖了、、
当您同时拥有外骨骼和灵巧手,你就能
12步搭建智能机器人: 从设计到AI入门
基于stm32和openmv的视觉机械臂.
复刻原版稚晖君Dummy机械臂之控制篇
今天测试一下这个机械臂能负重多少
空间机械臂关节驱动器
第五步-机械臂设计
机械臂加上AI打王者再也不会封号了,需要的微