V
主页
【论文分享】移动机械臂协同控制(五) —— 移动机械臂任务失败恢复
发布人
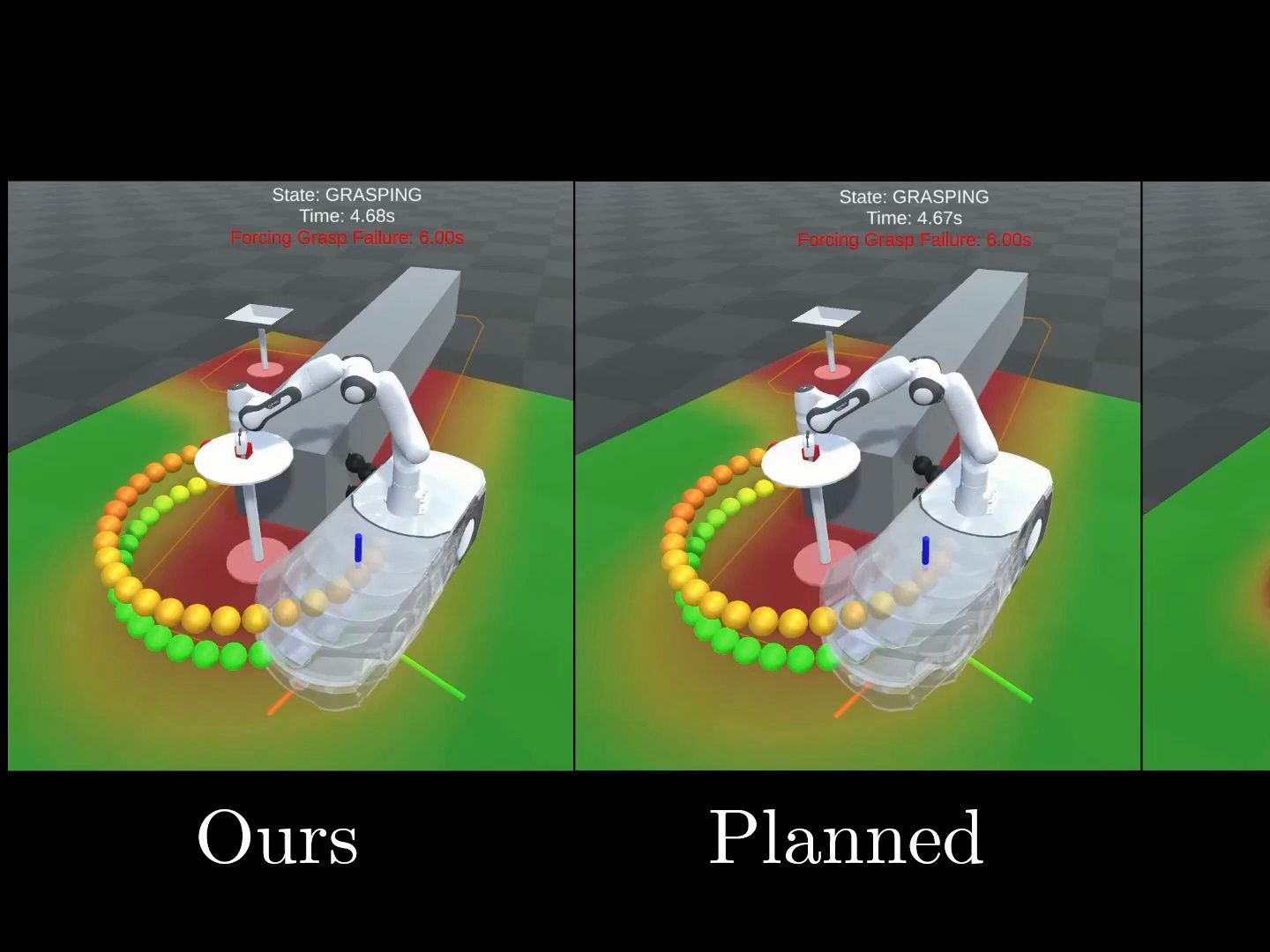
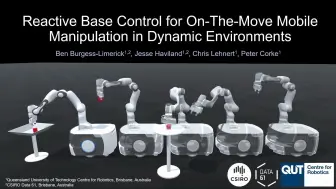
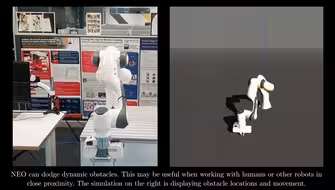
论文连接:《Enabling Failure Recovery for On-The-Move Mobile Manipulation》 相关网页:https://benburgesslimerick.github.io/MotM-FailureRecovery/ 研究团队:昆士兰科技大学机器人中心(QCR) 作者:Ben Burgess-Limerick, Chris Lehnert Jurgen Leitner, Peter Corke 年份:2023 摘要:我们提出了一种机器人基座放置和控制方法,使移动机械手能够在移动中执行任务时从操作故障中优雅地恢复。运动中的移动机械手完成任务的窗口有限,不像静止时,它可以重复尝试直到成功。移动中操纵的现有方法通常基于计划轨迹的开环执行,这不允许基本控制器对操纵失败做出反应,根据需要减速或停止。为了克服这一限制,我们提出了一种反应式基座控制方法,该方法在给定机器人当前状态、即时操纵任务以及多步任务的下一部分的情况下,重复评估最佳基座位置。其结果是,该系统保留了基座停止时传统移动操作方法的可靠性,但利用了通过在移动中执行操作而获得的性能增益。控制器保持基地在目标的范围内,只要需要从操作失败中恢复,同时尽可能多地朝着下一个目标前进。参见本伯格利默里克。
打开封面
下载高清视频
观看高清视频
视频下载器
【论文分享】移动机械臂协同控制(一) —— 机械臂反应式控制
【论文复现】移动机械臂协同控制(二)——机械臂动态避障
【论文复现】移动机械臂协同控制(十) Gazebo无重力补偿
【论文复现】移动机械臂协同控制(六)——UR5e_Tracer轨迹跟踪
【论文分享】移动机械臂协同控制(三)—— 机械臂+移动底盘实现车臂协同控制
【论文复现】移动机械臂协同控制(八)——在Gazebo上实现UR5e_Tracer_Robot控制
【论文分享】移动机械臂协同控制(四)—— 移动机械臂抓取动态物体
【论文复现】移动机械臂协同控制( 一 )——UR5e反应式控制
【论文分享】移动机械臂协同控制(六) —— 移动机械臂全身动态避障+任务失败恢复
【论文复现】移动机械臂协同控制(四)——UR5e_Tracer_Robot协同控制
【论文复现】移动机械臂协同控制(九) ——Gazebo上实现UR5e反应式控制
【论文分享】移动机械臂协同控制(二)—— 机械臂反应式控制 + 动态避障
Science Robotics | 无需外部传感器,通过关节力矩传感技术即可实现"触摸即命令"
机械臂协同操作
Nature | 颠覆传统设计!电动液压肌肉骨骼机器人腿,实现真正意义上的灵活、强适应性的且节能运动!
【论文复现】移动机械臂协同控制(三)——UR5e实物控制
桌面机械臂移动抓取 教学测试
【Python】冗余机械臂——逆运动学
开源6自由度机械臂
开源六轴机械臂组装教程
Qt/C++ opengl导入机械臂模型,添加ui拖拽交互,运动插补,包括关节和直线运动,可保存关节点信息
【论文复现】移动机械臂协同控制(五)——UR5e_Tracer_Robot病态到达姿势
我在用低代码玩机械臂
【论文复现】移动机械臂协同控制(七)——UR5e_Tracer_robot实物控制
[开源自制]机械臂主从控制
Ros2控制6轴机械臂,目前完成gazebo 仿真测试
ARX方舟无限机械臂 双边力控遥操作
INSGA算法+六自由度机械臂七次B样条曲线轨迹规划
FW-mid移动机器人 搭载机械臂 -贴板砖应用
多决策智能体的运动规划——上海交大董伟老师与荷兰代尔夫特理工Javier老师深度讨论
基于yolo和moveit的图像识别机械臂目标抓取搬移
基于ROS双臂协同的智能物流搬运系统
客户案例 | 基于松灵RANGER MINI 3.0底盘的双臂升降式具身智能平台的无限可能
《松灵ROS 2开讲啦》第8期 机械臂的使用
复刻稚晖君的dummy机械臂——透明板
【机械臂】张苹果的开源机械臂之如何上手玩
灵巧的双臂操作,9/12谷歌AI教机器人系鞋带,挂衣服,修理另一个机器人。这是谷歌在机器人灵巧性方面的两个最新进展之一
机器人末端夹爪
导师推荐的数据库!4个神级代码复现网站,里面99%的论文都能找到!
使用yolov8识别+深度相机+机械臂实现垃圾分拣机械臂