V
主页
京东 11.11 红包
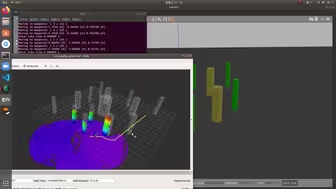
VLP Provides Pose Initialization and Correction for LiDAR-SLAM
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
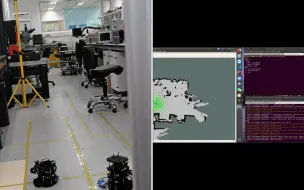
Demo:Multi-robot Cooperative Localization based on VLP and Odometer
Multi-sensor fusion for VLP-SLAM localization and navigation
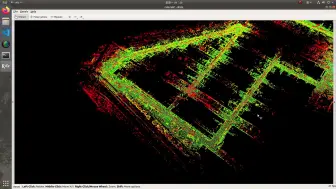
基于HKUST数据集的LOAM_livox复现V2(3D LiDAR SLAM)
Real-time Pose Estimation of Multi-sensor Fusion for VLP-SLAM based on EKF
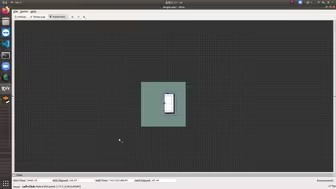
Simulation for ORB-SLAM
Robust Robotic Localization using Visible Light Positioning and Inertial Fusion
two_turtlebot2_LiDAR-SLAM_cartographer
Gaussian Splatting SLAM Testing using euroc mh02
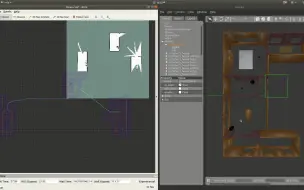
dvs_gazebo_simulation
FAST-LIVO测试之—LiDAR_Degenerate
Gaussian Splatting SLAM
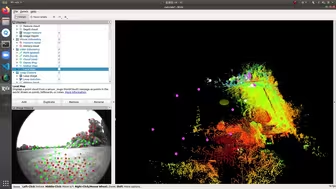
(激光雷达实时三维重建)ImMesh Testing using hku_main_building
Pose initialization for VLP-SLAM
基于nsh_indoor_outdoor数据集的A-LOAM复现(3D LiDAR SLAM)
Robotic Localization System based on Multi-Sensor Fusion for VLP and SLAM
LVI_SLAM复现(3D LiDAR SLAM)
基于QGC的PX4在线仿真
esvo_core
基于amcl-icp的2D-LiDAR Turtlebot2定位与导航
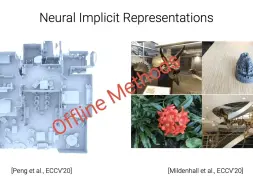
NICE-SLAM:Neural Implicit Scalable Encoding for SLAM
Tightly-coupled SLAM for the VLP Landmark, Wheel Odometer and RGB-D camera
cartographer_LIDAR_SLAM_basedon_QRcode_lamdmark
High Accuracy Robot Indoor Navigation using Visible Light Positioning and LiDAR
Robotics Naviagtion based on Lidar SLAM
single robot slam based on explore_lite package
dvs_velodyne_gazebo_simulation
DPVO testing 0493
Robot Localization & Navigation using Visible Light Positioning and SLAM Fusion
RGBD GS-ICP SLAM testing in rgbd_dataset_freiburg2_xyz
基于可见光通信的移动机器人室内定位与导航 (Robot Indoor Localization using Visible Light Positioning)
(ccmslam)基于三个agents的单目SLAM地图融合
基于3D-LiDAR的Astar路径规划
single kobuki robot slam based on rrt_exploration package
High Accuracy, 6-DoF Simultaneous Localization and Calibration using VLP
single robot slam based on explore_lite package 2
esvo_core_mvstereo
DPVO testing 0492
multi-robot slam map building based on rrt_exploration package
LIO-SAM_kitti_00
Drone flight using PL-EVIO as pose estimator