V
主页
京东 11.11 红包
Real-time Pose Estimation of Multi-sensor Fusion for VLP-SLAM based on EKF
发布人
HOMEPAGE:guanweipeng.com
打开封面
下载高清视频
观看高清视频
视频下载器
Multi-sensor fusion for VLP-SLAM localization and navigation
Demo:Multi-robot Cooperative Localization based on VLP and Odometer
Robotic Localization System based on Multi-Sensor Fusion for VLP and SLAM
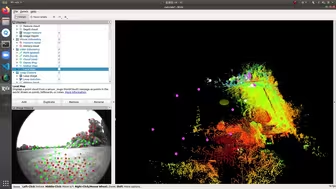
Tightly-coupled SLAM for the VLP Landmark, Wheel Odometer and RGB-D camera
RO-MAP:Real-Time Multi-Object Mapping with Neural Radiance Fields
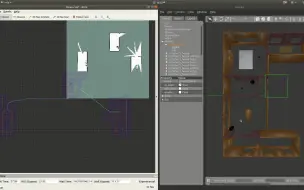
single kobuki robot slam based on rrt_exploration package
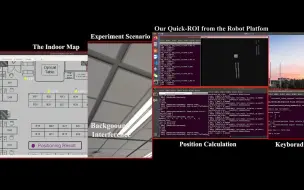
Pose initialization for VLP-SLAM
VLP Provides Pose Initialization and Correction for LiDAR-SLAM
(experiment) single turtlebot3 robot slam based on rrt_exploration package
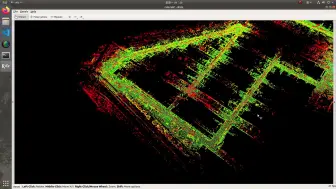
LVI_SLAM复现(3D LiDAR SLAM)
单机器人自主探索建图
3D Gaussian Splatting for Real-Time Radiance Field Rendering
基于HKUST数据集的LOAM_livox复现V2(3D LiDAR SLAM)
NeRF-VINS:A Real-time Neural Radiance Field Map-based Visual-InertialNavigation
Robust Robotic Localization using Visible Light Positioning and Inertial Fusion
(ccmslam)基于三个agents的单目SLAM地图融合
single robot slam based on explore_lite package 2
multi-robot slam map building based on rrt_exploration package
single robot slam based on explore_lite package
Gaussian-SLAM Photo-realistic Dense SLAM with Gaussian Splatting
单机器人自主探索建图(1)
Simulation for ORB-SLAM
Real-time testing our EVI-SAM
IROS 2022 —— 基于事件相机的单目视觉惯性里程计 / Event-based Monocular Visual Inertial Odometry
可见光定位在Android手机及ROS移动机器人上的应用
Gaussian Splatting SLAM Testing using euroc mh02
path Visualized multi-robot slam map building based on rrt_exploration package
High Accuracy Robot Localization using Single LED VLP with Odometer
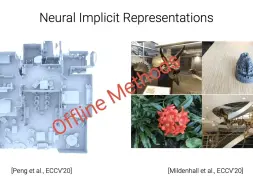
NeRF:Representing Scenes as Neural Radiance Fields for View Synthesis
dvs_gazebo_simulation
LONER:LiDAR Only Neural Representations for Real-Time SLAM
SplaTAM Testing using TUM-Dataset freiburg1_desk_seed0(训练过程可视化)
The Demo of SLO-VLP
High Accuracy Robot Indoor Navigation using Visible Light Positioning and LiDAR
LIO-SAM_kitti_00
NICE-SLAM:Neural Implicit Scalable Encoding for SLAM
基于QGC的PX4在线仿真
MSCKF-VIO
kinectv2_rtabmap
(path Visualized)multi-robot slam map building based on rrt_exploration package