V
主页
京东 11.11 红包
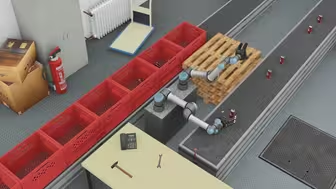
自动驾驶仿真和演示Apex.Autonomy 1.2
发布人
Apex.Autonomy 1.2 自动驾驶仿真和演示Apex.Autonomy 1.2 包括红绿灯 直行和右转
打开封面
下载高清视频
观看高清视频
视频下载器
ROS机器人虚拟仿真挑战赛rviz和gazebo
EMO桌面宠物机器人开箱试玩
Airsim仿真效果演示(转)
ROS机器人虚拟仿真挑战赛本地电脑环境配置记录
蓝桥云课ROS能结合V-Rep进行自动驾驶仿真演示?
ROS机器人虚拟仿真挑战赛时间98秒总分65分
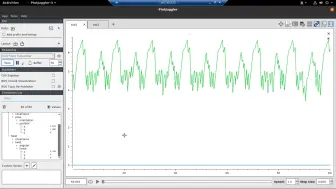
f1tenth仿真转向角曲线绘制
英伟达Omniverse的自动驾驶场景重构与生产线数字孪生
Hello Cozmo 小合集
Pop OS 20.04 LTS相比Ubuntu是否更好呢???
Webots- Universal Robots UR5e Simulation
Butter机器人
ROS机器人虚拟仿真挑战赛本地电脑环境配置个人问题汇总
ROS2和Gazebo9中mobot室内环境仿真测试
ROS机器人虚拟仿真挑战赛本地电脑环境配置测试
TurtleBot3 ROS2 快速上手 Foxy
自动驾驶赛车和狗狗们的故事
使用 Autoware ROS 2 CycloneDDS 实现高速自动驾驶
Webots- Clearpath Moose simulation
tianbotminirviz1
tianbotminirviz2
服务型移动机器人如何实现室内路径全覆盖清扫给你一个清爽干净的家(调试完整版记录)
f1tenth高速跑圈1-局部规划缺陷
通过量子编程输出演示确定程序对应不确定结果(活的信息)
f1tenth跑圈录屏测试-无卡顿版本
Emo机器人最新演示与Cozmo和Vector机器人对比
ROS机器人虚拟仿真挑战赛rviz跟随base_link视角
MoveIt ROS2移植
全开源的ROS2SLAM机器人 ROSBOT - ROS2 open source SLAM robot
ROS2基础6-服务
ROS2基础5-主题
CARLA自动驾驶排行榜
ROS2和Gazebo9中mobot跑道环境仿真测试
ROS2Multirobot
从云课五分钟到一分钟之v-rep_pro_edu_v3_6_2
ROS机器人虚拟仿真挑战赛快速跑圈“示波器”
ROS2基础2-工具(Turtlesim, CLI and Rqt)
ROS2基础7-行动
esp32(ROS2foxy)之飞龙在天turtlesim最快能多快???
Autoware和ROS2课程讲座2 ROS2基础