V
主页
Solo12 的首次无线测试,WiFi + 电池更新
发布人
https://www.youtube.com/watch?v=ZxmbFny51Pg 在这些初步测试中,Solo12 由两节 3s-850ma 电池供电,并由在桌面控制器上以 1kHz 运行的步行控制器 MPC 远程控制。数据通过原始低级 801.11g 链接 (WiFi) 在机器人和远程 PC 之间交换。电池和能源消耗通过附加的“电源板”读取 24V 直流总线上的电压和电流进行监控。控制器的自主性估计约为 20 分钟
打开封面
下载高清视频
观看高清视频
视频下载器
新西红柿狗腿子四足之【ps3手柄蓝牙无线连接・Wi-Fi通信测试】
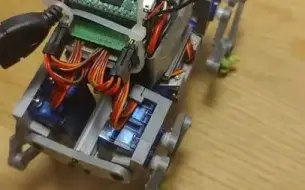
【搬】Mini12自由度舵狗
【搬】机构欣赏
球齿轮复现
LEGO 无线可控独轮车
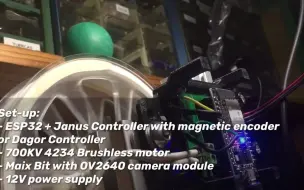
使用SimpleFOC和计算机视觉控制球轮系统
【搬】用于无传感器动态交互任务的可反向驱动的六自由度并联机器人
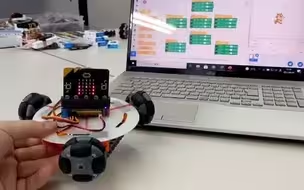
全向小车
外国小哥哥做的开源12自由度舵狗仿真欣赏
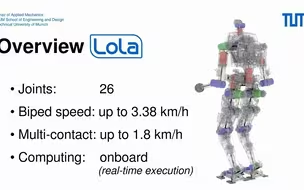
【搬】人形机器人 LOLA - 自主多接触运动的行走模式生成
【搬】机构欣赏
【搬】结合采样和优化的腿轮机器人规划
新西红柿狗腿子之【电路测试正常】
【搬】全向移动不倒翁小车欣赏
【搬】机构欣赏
满满一大箱电池!怪可惜的
【搬】在闭环中心模式生成器中学习机器人动力学的塑性匹配
行走机构验证
原来那位大佬把这个仿真程序也公开了
AE 合成分解 调色思路 新手向
摆线齿轮减速学习小结【附学习用的水代码】
苏黎世digital twin -新型垂直起降无人机| WingtraOne GEN II 和 Oblique Sony a6100
画图摸鱼,没打印测试,不知道能动不。。
【搬】小机甲欣赏
【搬】Vitruvio_ 用于行走机器人的开源腿部设计优化工具箱
【CDR教程】2024最新CDR教程!零基础快速入门,干掉只会PS的同事 !!(持续更新中...)
这个显示水平如何?
变形金刚 起源 至尊變形級/ D级 大黄蜂 B-127 TFOne Transformers One主线 胡服騎射的變形金剛分享時間1881集
高效可锁定弹簧踝(ELSA)假体
慢慢组装处理中
【搬】BirdBot,一种以鸟腿为灵感的节能机器人腿
【搬】KINETIC 6 - 3D打印齿轮欣赏
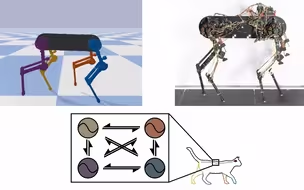
Gerardo Bledt(麻省理工学院):推广和改进腿式机器人的正则化预测控制
【東方:DIY】我做了一个可以射击Master Spark八卦炉!
【搬】带爪的机械臂?
【电磁阀】5分钟带你搞懂常见电磁阀原理介绍
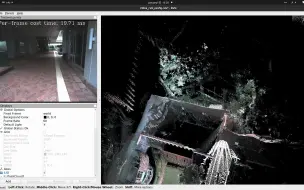
开源R3LIVE的hku_campus_seq_00.bag运行欣赏
【搬】WiSwarm:用于无人机协作团队的基于信息时代的无线网络
西红柿狗腿子Ver2
【搬】ICRA 2021_ 带离合欠驱动关节的轮式 V 形管道内机器人 (AIRo-3.1)