V
主页
京东 11.11 红包
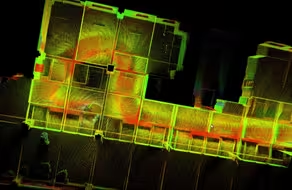
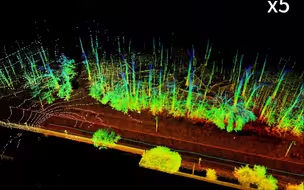
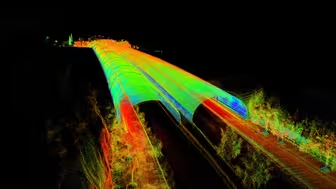
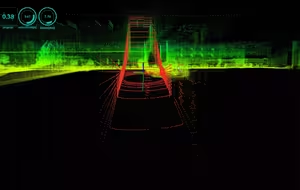
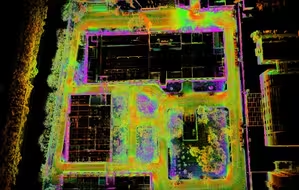
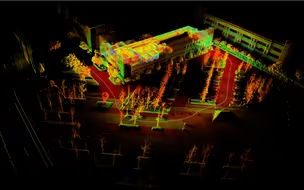
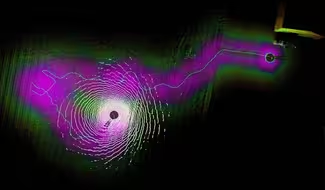
自研多传感器融合定位(HD map)
发布人
多传感器融合定位,融合GPS,IMU,Lidar和先验地图,HD map显示,地图动态加载,得益于自己推导的LIO和地图管理,平均处理一帧数据用时20ms;
打开封面
下载高清视频
观看高清视频
视频下载器
自研反光柱定位
自研多传感器融合定位
手持mid-360多楼层LIO构图测试
自研激光里程计,测试NCLT数据
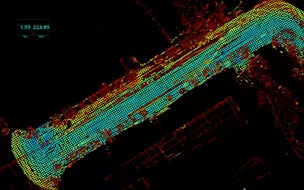
手持mid-360隧道LIO构图测试
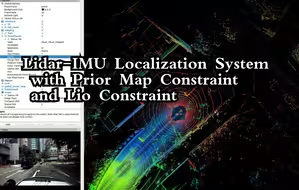
【开源】Lidar-IMU-Localization,基于先验地图和激光里程计约束的定位系统
3D激光定位测试
【开源】一种快速鲁邦的激光里程计方法
【开源】Lidar-IMU-Localization,基于先验地图和激光里程计约束的定位系统
自研2d激光动态构图(非cartographer)
【开源】IESKF-LIO,基于迭代卡尔曼滤波的激光里程计(fast-lio2复现)
多传感器融合SLAM松耦合与紧耦合
STD闭环测试
【开源】M-IESKF-LIO,基于迭代卡尔曼滤波的激光里程计(多激光同时构图)
【开源】BoW3D-LeGO-LOAM,测试BoW3D(2022 RA-L)及scancontext(2018 IROS)闭环
【已开源】IESKF-LIO,基于迭代卡尔曼滤波的激光里程计
Cont2-LeGO-LOAM,测试Cont2(2023 ICRA)及scancontext(2018 IROS)闭环
激光里程计最新成果展示
自研反光柱定位(ROS版)
对比point-lio,mid-360数据
【开源】IESKF-LIO+Greedy based Feature Select
为什么需要多传感器融合
手持旋转扫描仪构图测试(alpha_lidar)
CT-LIO: Continuous-Time LiDAR-Inertial Odometry
CT-LIO: Continuous-Time LiDAR-Inertial Odometry
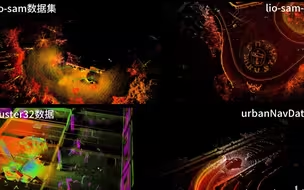
[开源]地面无人车lio-sam-modified构图
【开源】纯GPS定位,输出位置和方向(gnss_localizer)
除了激光SLAM和视觉SLAM还有哪些研究方向
【开源】Livox Mid-360 with IESKF - LIO
跨楼层构图效果展示
RTABMAP算法激光视觉融合SLAM
机器人多传感器融合
SLAMesh增加去畸变对比测试
多传感器融合算法落地改进建议
LIO构图测试
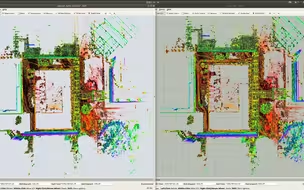
自研激光里程计,对比fast-lio2
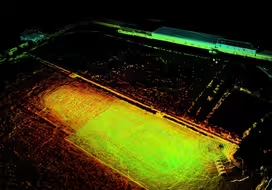
空旷田野LIO测试
HM-LIO: A Hash Map based LiDAR-Inertial Odometry
激光雷达SLAM多传感器融合算法中工程化技巧总结
voxelmap-based LIO