V
主页
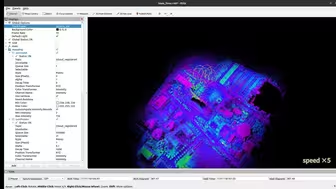
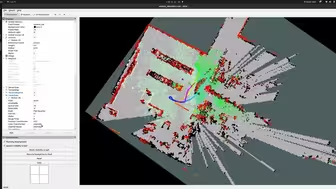
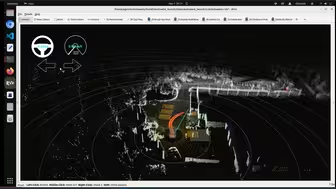
ROS2|多传感器数据采集|无人车|LiDAR|SLAM|IMU|Odometry
发布人
ROS2 & Rviz2 LiDAR IMU Odometer GPS(nonvalid data) 放假回家前采集一组数据方便测试 终于可以休息一下了…
打开封面
下载高清视频
观看高清视频
视频下载器
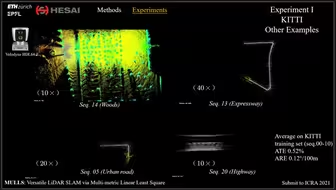
港大ArcLab重磅开源LVI-GS:3DGS紧耦合LiDAR-视觉-惯性SLAM!实时照片级建图!
【开源】宇树Unitree Go2四足机器人/机器狗Isaac Sim/Isaac Lab ROS2仿真平台
iKalibr: 统一的多传感器无靶标时空标定
Autoware.universe移植到AGX Orin并且和台式机联调
【开源无人车】从零调试一辆PIX无人车
【开源无人车】从零组装一辆开源PIX无人车
菜鸟无人车上线“双11” 单车日均运送包裹2000件
自驾车ROS实践 - Self Driving and ROS – Learn by Doing! Odometry & Control
GPS+IMU+3D激光建图
《ROS2 机器人操作系统》实验七 Gazebo操作基础
A-LOAM和LeGo-LOAM的SLAM对比,使用Kitti数据集odometry的05序列
无人机SLAM入门教程(一):课程概述1.3 传感器简介
比啃书高效多了!清华高翔博士亲授【视觉SLAM十四讲】视频教程全集,一起来体验醍醐灌顶的感觉!
[IEEE TCSVT 2024]语义无关的动态SLAM
无人机搭载livox avia采集点云数据,rosbag记录数据,FAST-LIO建图
矿洞扫描有难度?看赛尔S10如何轻松应对!
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
Cartographer 算法论文《Real-Time Loop Closure in 2D LIDAR SLAM》精读 激光SLAM算法
fastlio建图与自主导航演示
IROS'24开源 | 全新动态V3D-SLAM:3D语义几何投票的动态鲁棒RGB-D SLAM
俄军新型无人地面车辆已用于向俄罗斯陆军前沿阵地运送补给!
遥控器为什么普遍使用S.BUS协议?3分钟看懂S.BUS通信原理!
要啥激光雷达,2D、2.5D、3D地图我全都有,Factor Perception SDK纯视觉SLAM地图数据展示
IEEE RAL空间机器人视觉导航/SLAM算法评估 Pyojin Kim发表首个舱内机器人外太空视觉-惯性数据集
自动泊车
百度第六代无人车是世界上唯一量产的L4级无人车
无人驿站和无人小车
基于Gazebo的无人车激光SLAM建图与导航仿真
无人机SLAM入门教程(一):课程概述1.1 SLAM基础概念
《ROS 2机器人开发从入门到实践》7.3.1Navigation2介绍与安装
Go2开发教学10-SLAM 导航服务接口
使用ROS2-Control + RL来控制四足机器人
【开源】百元价格就能实现学习ROS和SLAM导航的口袋式桌面机器人!
电磁炮武装机器人射击#机器人#电磁炮#无人车#坦克
KSP UGV 6*6 无人车#无人车#无人机#机器人#科技
使用Isaac对Orin NX进行硬件在环测试(视觉SLAM)
谁说跑VSLAM就得小心翼翼?我们的VIO鲁棒性爆表,放心用,还有200 Hz的高帧率定位输出
22年十佳开源SLAM算法
【SLAM-2024】第五届全国SLAM技术论坛-上海交通大学-卢策吾-具身智能的PIE模式研究
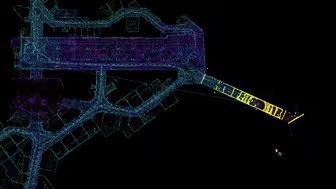
一个没啥特点的工程化激光slam(某二线城市的“大型”地铁站)