V
主页
【ICRA2021】iCalib: 惯性辅助多传感器校准
发布人
大多数自主机器人上可用的一系列异构传感器广泛用于状态估计和环境感知,需要对内在、空间和时间传感参数进行精确校准。在本文中提出了一种基于整体非线性最小二乘法 (NLS) 的多传感器校准系统,该系统利用高速惯性导航并可以处理机器人上常见的多种异步传感器(例如 IMU、相机、激光雷达和车轮里程计),而只需要初始校准猜测。我们进行了广泛的模拟,以验证系统在理想运动情况下的准确性、一致性和性能。特别是,我们对平面运动如何导致标定退化以及它如何直接影响我们标定参数的能力进行了深入研究,这对无人车有重要意义。
打开封面
下载高清视频
观看高清视频
视频下载器
【ICRA2021】在线校准的高效多传感器辅助惯性导航
【ICRA2021】直接稀疏双目视觉-惯性全局里程计
【ICRA2021】里程计辅助视觉惯性 SLAM 的双向轨迹计算
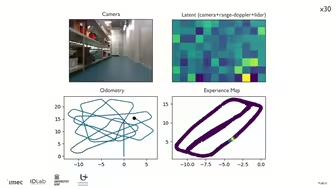
【ICRA2021】LatentSLAM:用于定位和建图的无监督多传感器表示学习
【ICRA2021】使用快速可见树的实时机器人路径规划
【ICRA2021】互联系统的耦合控制Lyapunov函数及其在四足运动中的应用
【ICRA2021】有数据驱动补丁先验的 MCMC 占用栅格建图
【ICRA2021】学习用于长视界视觉导航的可组合行为嵌入
【ICRA2021】用于自动驾驶汽车的基于 SRIF 的鲁棒 LiDAR-IMU 定位
【ICRA2021】UVIP:用于复杂室内环境的强大的 UWB 辅助视觉惯性定位系统
【ICRA2021】高效鲁棒导航的分层目标地图估计
【整整600集】这绝对是B站讲的最全的传感器系统教程,让你少走99%的弯路!这还学不会,我永久退出机械圈!
【ICRA2021】Graph-SIM:用于行人动作预测的基于图的时空交互建模
【ICRA2021】3756-远程类车车辆的触觉引导路径生成
【ICRA2021】概率 SLAM 的马尔可夫并行跟踪和映射
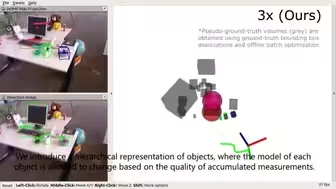
【ICRA2021】紧密耦合激光雷达视觉惯性里程表的统一多模态地标跟踪
【ICRA2021】鲁棒单目视觉惯性深度的嵌入式系统的实现
【ICRA2021】3988-大尺度环境严重里程计漂移下自主体积探测的统一方法
【ICRA2021】通过地图建模对自动驾驶车辆进行路线覆盖测试
如何快速判断传感器是NPN还是PNP?看完此视频秒懂,记得点赞收藏。
5-1 特征点提取与匹配
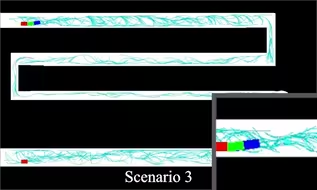
【ICRA2021】3508-ERASOR:一种基于栅格占据情况之差异的动态物体过滤方法
【ICRA2021】自动驾驶和地图学习的定制地标表示的自动建图
【ICRA2021】机器人导航的主动模块化环境
【ICRA2021】APPLI:从干预中学习自适应规划器参数
【ICRA2021】单目直接视觉里程计中基于特征的重定位的紧密集成
【ICRA2020】变化的城市场景下激光雷达惯性里程计辅助的鲁棒激光雷达定位系统
【ICRA2021】从双目和 RGB-D 相机中注册语义点云的新框架
【ICRA2021】面向阿克曼转向车辆的基于在线 RRT 的路径规划算法
【ICRA2021】PHASER:一种无需对应的鲁棒全局点云配准
【ICRA2021】CAROM - 道路基础设施单目相机的车辆定位和交通场景重建
【ICRA2021】稳健 RGB-D SLAM 系统的多参数优化
【ICRA2021】基于可解释目标的自动驾驶预测与规划
【ICRA2021】RELLIS-3D 数据集:数据、基准和分析
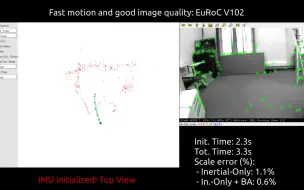
【ICRA2020】视觉惯性初始化的纯惯性优化方法
什么是压力传感器?
【ICRA2021】连接语义建筑信息模型和机器人:基于2D LiDAR的定位应用
【ICRA2021】TT-SLAM:用于平面环境的密集单目 SLAM
【ICRA2021】3809-基于优化的视觉惯性SLAM与原始GNSS测量紧密耦合
【ICRA2021】4079-SKD:用显著性估计对点云进行关键点检测