V
主页
【ICRA2021】UVIP:用于复杂室内环境的强大的 UWB 辅助视觉惯性定位系统
发布人
没有 GPS 的室内定位是一项具有挑战性的任务,尤其是在复杂场景或传感器失效时。在本文中,我们开发了一种超宽带辅助视觉惯性定位系统(UVIP),旨在在复杂的室内环境中实现准确和鲁棒的定位结果。为此,首先设计了一种基于点线的立体视觉惯性里程计(PL-sVIO),利用线特征提高结构化或低纹理场景下的定位精度。其次,针对处理大环境和视点变化的情况,提出了一种基于 CNN 描述的图像块特征的闭环方法来抑制 PL-sVIO 的漂移。第三,针对视觉传感器发生故障的情况,提出了一种准确的重定位方法。
打开封面
下载高清视频
观看高清视频
视频下载器
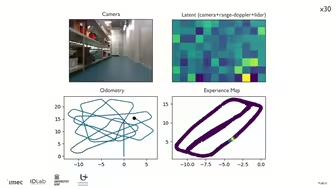
【ICRA2021】LatentSLAM:用于定位和建图的无监督多传感器表示学习
【SLAM】【VIO】双目视觉+超强三维感知力【室内复杂空间内——同步定位.建图.导航】“实测”
【ICRA2021】里程计辅助视觉惯性 SLAM 的双向轨迹计算
【ICRA2021】直接稀疏双目视觉-惯性全局里程计
5-1 特征点提取与匹配
1-1课程内容与预备知识
【ICRA2020】变化的城市场景下激光雷达惯性里程计辅助的鲁棒激光雷达定位系统
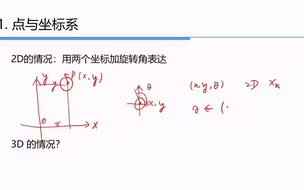
2-1 点与坐标系
【ICRA2021】用于特定领域重定位的同步多级描述符学习和语义分割
【ICRA2021】视觉惯性里程计的等变滤波器
【ICRA2021】协同视觉惯性里程计
【ICRA2021】半动态环境中的终身定位
【ICRA2021】LiDAR和相机的基于线的自动外部校准
【ICRA2021】使用快速可见树的实时机器人路径规划
【ICRA2021】紧密耦合激光雷达视觉惯性里程表的统一多模态地标跟踪
【ICRA2021】iCalib: 惯性辅助多传感器校准
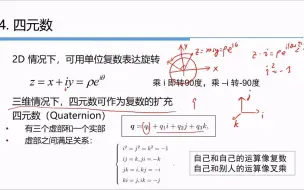
2-4 四元数
【ICRA2021】相机IMU UWB的距离聚焦融合用于精确和减少漂移的定位
【ICRA2021】基于平面几何的单目视觉里程计准确鲁棒的尺度恢复
2-2 旋转矩阵
【SLAM】【VIO】双目视觉+超强大的三维感知能力【应用场景——办公室内】“定位&导航规划”“实测”【传感器】
【ICRA2021】大规模环境下基于语义直方图的图形匹配实时多机器人全局定位
【ICRA2021】移动机器人 3D 三角形网格上的连续最短路径矢量场导航
【ICRA2021】机器人导航的主动模块化环境
【ICRA2021】4081-一种集成波束形成映射的FastSLAM方法用于基于超声波的金属结构机器人检测
r3live语义建图
【ICRA2021】CamVox:低成本且准确的激光雷达辅助视觉 SLAM 系统
【ICRA2021】CodeVIO:具有学习优化密集深度的视觉惯性里程计
【ICRA2021】用于自动代客泊车的基于混合鸟瞰边缘的语义视觉 SLAM
大疆livox-mid360室外定位
【ICRA2021】快速高效地探索大型复杂环境
【ICRA2021】MDANet:用于深度完成的多模式深度聚合网络
AVP-SLAM- 停车场内自主车辆的语义视觉地图构建与定位
【ICRA2021】3745-SD DefSLAM:用于可变形和体内场景的半直接单目SLAM
无人机室内自主飞行,和地面站操作
【ICRA2021】3767-通过增量采样和概率路线图对动态环境进行自主UAV探索
【ICRA2021】鲁棒单目视觉惯性深度的嵌入式系统的实现
【ICRA2021】LVI-SAM:紧耦合的激光雷达-视觉-惯性里程测量,通过平滑和建图
【ICRA2021】高效鲁棒导航的分层目标地图估计
邹丹平-城市拒止环境下的视觉SLAM