V
主页
京东 11.11 红包
【ICRA2021】稳健 RGB-D SLAM 系统的多参数优化
发布人
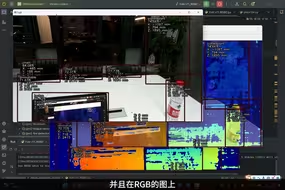
SLAM 系统可以使用 RGB-D 相机检索其度量尺度和深度信息。然而,受感测范围和物体结构的限制,RGB-D相机无法始终正常工作,有时会出现故障。在这项工作中,我们提出了基于最大后验估计的初始化和定位方法。我们的系统赋予单目关键点有效的深度值,并将它们引入捆绑调整。深度偏差系数和比例因子也在局部窗口中进行了优化,在大规模环境和长时间运行的操作中获得了鲁棒性。实验结果表明,与文献中其他优秀方法相比,我们的系统提供了最好的鲁棒性,能够处理 TUM RGB-D 数据集中最具挑战性的序列。
打开封面
下载高清视频
观看高清视频
视频下载器
【ICRA2021】强度SLAM:大规模环境的强度辅助定位和建图
【ICRA2021】将基于人类风险的制动系统集成到露天移动机器人中
【ICRA2021】3475-OV2SLAM:用于实时应用的完全在线和通用的视觉SLAM
【ICRA2021】从双目和 RGB-D 相机中注册语义点云的新框架
【ICRA2021】固态激光雷达的轻型三维定位和建图
【ICRA2021】使用快速可见树的实时机器人路径规划
【ICRA2021】4079-SKD:用显著性估计对点云进行关键点检测
【ICRA2021】直接稀疏双目视觉-惯性全局里程计
【ICRA2021】3505-MOLTR:单目RGB视频的多目标定位、跟踪和重建
【ICRA2021】快速高效地探索大型复杂环境
【ICRA2021】3756-远程类车车辆的触觉引导路径生成
【ICRA2021】在线校准的高效多传感器辅助惯性导航
5-1 特征点提取与匹配
【ICRA2021】动能缓冲器避障
【ICRA2021】3731-用于大规模勘探任务的弹性高效激光雷达重建
【ICRA2021】学习用于长视界视觉导航的可组合行为嵌入
【ICRA2021】有数据驱动补丁先验的 MCMC 占用栅格建图
【ICRA2021】机器人远程操作与工作负载管理的多资源理论设计原理研究
探索YOLO v11:3D人工智能的RGB-D视觉革命
【ICRA2021】自动驾驶汽车的轻量级语义网格建图
【ICRA2021】3518-在不利环境条件下使用轻型、低成本毫米波雷达导航的表示的跨模态对比学习
Fast LIVO 硬同步过程释疑
SLAM为什么需要IMU
【ICRA2021】3602-移动机器人导航的终身学习方法
【ICRA2021】3794-学习使用各种LiDAR配置进行无地图导航:一种基于支持点的方法
【ICRA2021】3764-基于相对安全飞行走廊的动态环境中多旋翼机的在线轨迹规划
【ICRA2021】基于实时3d激光雷达、毫米波雷达和GPS/IMU融合的非结构化环境下车辆检测与跟踪
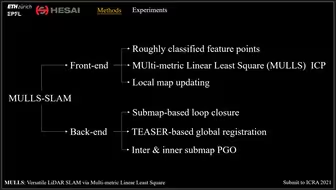
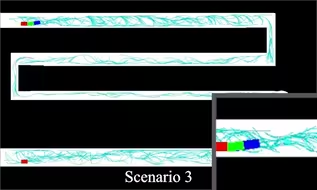
【ICRA2021】MULLS:多度量线性最小二乘法的多功能激光雷达SLAM
1-3 视觉SLAM的数学描述
【ICRA2021】3664-LoLa SLAM:使用连续扫描切片的低延迟激光雷达SLAM
【ICRA2021】面向阿克曼转向车辆的基于在线 RRT 的路径规划算法
【ICRA2021】S3Net:3D LiDAR 稀疏语义分割网络
【ICRA2021】LIRO:紧耦合激光雷达惯性里程计
三维空间扫描仪 高效率重建古建筑
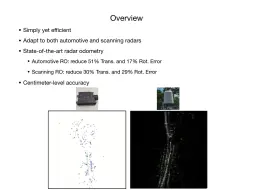
【ICRA2021】为扫描雷达和车载雷达设计的基于正态分布变换的雷达里程计
【ICRA2021】移动机器人 3D 三角形网格上的连续最短路径矢量场导航
【ICRA2021】鲁棒单目视觉惯性深度的嵌入式系统的实现
轮式里程计激光里程计视觉里程计区别是什么
【ICRA2021】LiDAR和相机的基于线的自动外部校准
【ICRA2021】通过地图建模对自动驾驶车辆进行路线覆盖测试