V
主页
京东 11.11 红包
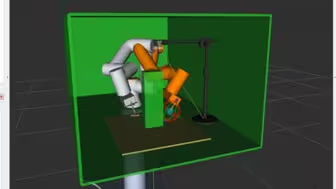
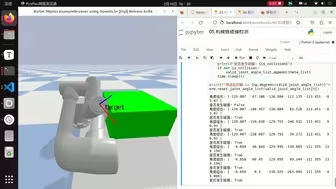
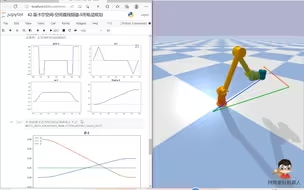
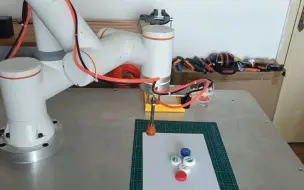
ROS2+MoveIt2四自由度机械臂运动规划
发布人
ROS2 MoveIt2目前还没有实现初始化助手(Setup Assistant)的功能, 因此只能选择先用MoveIt1的初始化助手导出机械臂的MoveIt配置包, 然后再将配置包迁移到ROS2+MoveIt2。 由于没有官方文档说明, 所以在迁移的过程中踩了很多坑。 MoveIt2系统入门课开发中...
打开封面
下载高清视频
观看高清视频
视频下载器
Qt/C++ opengl导入机械臂模型,添加ui拖拽交互,运动插补,包括关节和直线运动,可保存关节点信息
硬核+开源 稚晖君Dummy机械臂全新升级谐波无刷电机版 - Dummy2 它来了!😄
rda-ros开源:RDA planner 的ROS接口及在自动驾驶和动态避障方面的应用展示
节卡JAKA C7-六轴协作机械臂-自研Python运动控制系统
机械臂TCP标定辅助工具-法奥FR3
《ROS 2机器人开发从入门到实践》5.2Python中的手眼坐标变换
【开源教程】ROS+PX4开源机械臂控制(下)
基于ROS2的树莓派自主定位与导航小车
机械臂笛卡尔空间位姿插补
使用ROS2-Control + OCS2来控制四足机器人
ROS MoveIt规划场景中添加虚拟墙
笛卡尔空间-空间圆弧插值+Slerp姿态插值混合-六轴协作机械臂PyBullet仿真
一个小巧的6轴机械臂
手搓Aloha机械臂训练
法奥FR3 物块抓取案例 ROS MoveIt
六轴协作机械臂运动学+碰撞检测实验
笛卡尔空间-空间直线插值-S形轨迹规划-六轴协作机械臂PyBullet仿真
机械臂3D视觉抓取 -YoloV8目标检测-法奥FR5六轴协作机械臂-奥比中光Gemini2 3D相机
FR3仿真机+真机MoveIt路径规划 阿凯法奥ROS包(akai-fr-ros)
[开源] 基于Qt的ROS1/ROS2人机交互软件-V0.3.7版本,优化建图时的地图显示效果
《ROS 2机器人开发从入门到实践》6.2.2 在RViz中显示机器人
法奥FR3 路径规划 OMPL+FCL+Open3D
无人驾驶CAN通信快速入门:部署、测试,全过程精细讲解(主讲录制人:严正清;技术小组:小组:陈云、贾岚博、刘志强、张连会)
【开源教程】ROS+PX4开源机械臂控制(上)
ROS2功能包与三大通信机制编程
【Python】模仿学习——高斯混合模型
Innfos Gluon 六轴协作机械臂-自研Python运动控制系统
一个基于CUDA的真实丛林环境的仿真
客户案例 | 基于松灵RANGER MINI 3.0底盘的双臂升降式具身智能平台的无限可能
路径规划|基于维诺图的路径规划算法(ROS C++/Python/Matlab实现)
《ROS 2机器人开发从入门到实践》6.2.4创建机器人及传感器部件
高精度手眼标定效果展示(法奥FR3+奥比中光Gemini335)
《ROS 2机器人开发从入门到实践》5.1.2对TF原理的简单探究
空间机械臂关节驱动器
手柄遥控效果-Innfos Gluon六轴协作机械臂-机械臂示教
开源超低成本谐波减速,文件分享在评论区。
视觉组 | YOLO自瞄终于能打中了
《ROS 2机器人开发从入门到实践》6.3.2为机器人部件添加质量与惯性
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
机械臂手眼标定(眼在手外)–法奥FR3-ROS RVIZ