V
主页
京东 11.11 红包
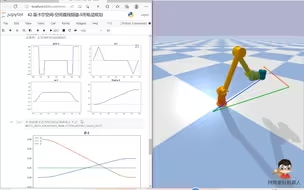
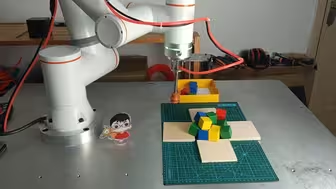
FR3仿真机+真机MoveIt路径规划 阿凯法奥ROS包(akai-fr-ros)
发布人
阿凯法奥ROS包(akai-fr-ros)使用MoveIt Python SDK进行机械臂路径规划的效果视频。 弃用ros_control, 编写了机械臂MoveIt轨迹执行服务端,机械臂现在流畅多了。
打开封面
下载高清视频
观看高清视频
视频下载器
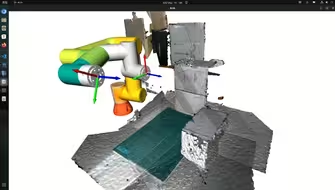
法奥FR3 路径规划 OMPL+FCL+Open3D
机械臂手眼标定(眼在手外)–法奥FR3-ROS RVIZ
高精度手眼标定效果展示(法奥FR3+奥比中光Gemini335)
可乐罐6DOF姿态估计与抓取案例-法奥FR3-奥比中光Gemini2
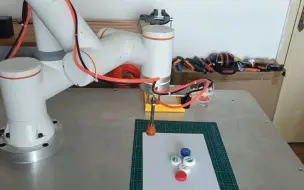
法奥FR3 马克笔3D视觉抓取案例
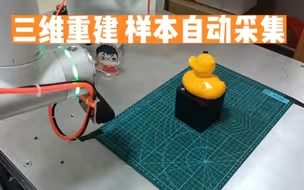
三维重建样本自动采集-法奥FR5协作机械臂+奥比中光Gemini2 3D相机
3D相机环拍扫描-三维重建样本采集自动化
法奥FR3 物块抓取案例 ROS MoveIt
RRT*路径规划算法(1)
rda-ros开源:RDA planner 的ROS接口及在自动驾驶和动态避障方面的应用展示
二自由度云台上位机功能演示-阿凯&FashionStar
五子棋分拣–法奥协作机械臂FR3 ROS MoveIt-数字孪生
基于地形的路径规划案例
钧舵EPG50-60柔性夹爪 ROS SDK–法奥FR3长臂猿模式
[复现]基于MPC模型预测控制水下机器人AUV路径规划及轨迹跟踪仿真
机械臂TCP标定辅助工具-法奥FR3
机械臂3D视觉抓取 -YoloV8目标检测-法奥FR5六轴协作机械臂-奥比中光Gemini2 3D相机
笛卡尔空间-空间直线插值-S形轨迹规划-六轴协作机械臂PyBullet仿真
IEEE顶刊:水下机器人AUV路径规划和MPC模型预测控制跟踪控制(复现)
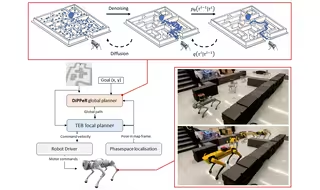
[ICRA 2024] DiPPeR: Diffusion-based 2D Path Planner applied on Legged Robots
20sffactory 3D打印机械臂-视频合集
节卡JAKA C7-六轴协作机械臂-自研Python运动控制系统
自适应夹爪-抓取效果-Innfos Gluon六轴协作机械臂
四元数基本运算与姿态插补-PyBullet仿真
也是玩上ROS了
Innfos Gluon 六轴协作机械臂-自研Python运动控制系统
一阶倒立摆LQR, MPC控制,Python, C++源码公开, Gazebo仿真
ROS2+MoveIt2四自由度机械臂运动规划
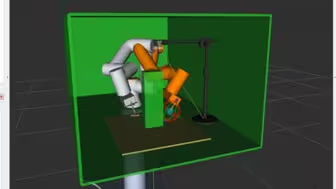
ROS MoveIt规划场景中添加虚拟墙
笛卡尔空间-空间圆弧插值+Slerp姿态插值混合-六轴协作机械臂PyBullet仿真
视觉组 | 搓出了第1版使用 ROS2 + YOLO v8 的自瞄
【OpenCV基础教程】3.人脸追踪-舵机云台比例控制(1Z实验室)
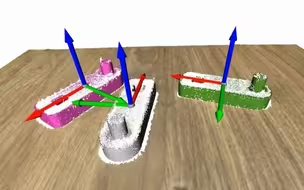
基于ICP点云配准的工件位姿估计-Open3D
彩色木块无序抓取-YoloV8实例分割-奥比中光Gemini2+法奥FR5六轴协作机械臂
室外ROS 深夜调车,一鼓作寄
【MicroPython】PlotClock绘图机器人(1Z实验室)
ROS控制 | 第一轮导航代码讲解
五子棋机械臂 人机对战 法奥FR3 ROS教育机器人 数字孪生
UR5机械臂运动学的Python实现+PyBullet机械臂仿真
手眼标定实验-眼在手上-奥比中光Gemini2+法奥FR5六轴协作机械臂