V
主页
京东 11.11 红包
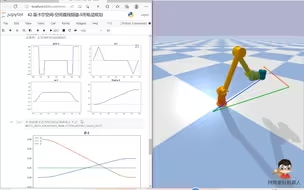
ROS MoveIt规划场景中添加虚拟墙
发布人
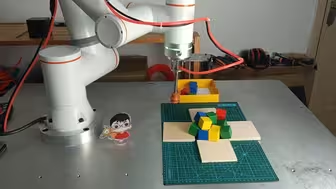
ROS MoveIt规划场景中,添加虚拟墙,用于生成关节空间更小位移的轨迹,同时也可以避免机械臂与不在规划场景中的物体发生碰撞,例如墙面/桌面。 六轴协作机械臂机型:法奥FR3
打开封面
下载高清视频
观看高清视频
视频下载器
法奥FR3 路径规划 OMPL+FCL+Open3D
机械臂手眼标定(眼在手外)–法奥FR3-ROS RVIZ
今年可以完成去年国二的遗憾吗
FR3仿真机+真机MoveIt路径规划 阿凯法奥ROS包(akai-fr-ros)
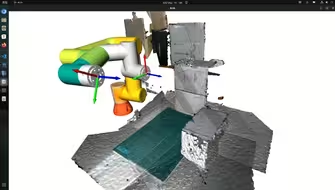
3D相机环拍扫描-三维重建样本采集自动化
机械臂TCP标定辅助工具-法奥FR3
ROS2+MoveIt2四自由度机械臂运动规划
机械臂3D视觉抓取 -YoloV8目标检测-法奥FR5六轴协作机械臂-奥比中光Gemini2 3D相机
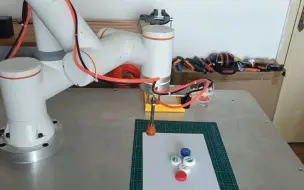
法奥FR3 马克笔3D视觉抓取案例
法奥FR3 物块抓取案例 ROS MoveIt
笛卡尔空间-空间直线插值-S形轨迹规划-六轴协作机械臂PyBullet仿真
自适应夹爪-抓取效果-Innfos Gluon六轴协作机械臂
ROS控制 | 第一轮导航代码讲解
ROS控制 | 第一轮控制功能包讲解
H743 ROS开发验证板
画了一个机器人ROS开发板
强化学习-自动驾驶路径规划控制决策-sac的高速公路和遮挡场景训练
【开源教程】ROS+PX4开源机械臂控制(上)
彩色木块无序抓取-YoloV8实例分割-奥比中光Gemini2+法奥FR5六轴协作机械臂
三维重建样本自动采集-法奥FR5协作机械臂+奥比中光Gemini2 3D相机
视觉组 | YOLO自瞄终于能打中了
基于地形的路径规划案例
第23讲:Move_base二维自主导航规划
六轴协作机械臂运动学+碰撞检测实验
【开源教程】ROS+PX4开源机械臂控制(下)
笛卡尔空间-空间圆弧插值+Slerp姿态插值混合-六轴协作机械臂PyBullet仿真
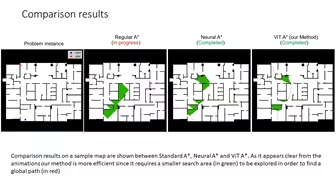
[Humanoid 2023] ViT A*: Legged Robot Path Planning using Vision Transformer A*
五子棋分拣–法奥协作机械臂FR3 ROS MoveIt-数字孪生
Innfos Gluon 六轴协作机械臂-自研Python运动控制系统
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
四自由度机械臂-算法升级-运动效果演示
轮足静态障碍物导航避障
游戏手柄遥控-法奥协作机械臂
室外ROS 深夜调车,一鼓作寄
机械臂工作区Base标定 法奥机械臂FR3
手眼标定实验-眼在手上-奥比中光Gemini2+法奥FR5六轴协作机械臂
ROS2功能包与三大通信机制编程
第20讲:三维激光雷达SLAM仿真
[ICRA 2024] DiPPeR: Diffusion-based 2D Path Planner applied on Legged Robots
【开源教程】ROS基础例程详解