V
主页
Block-NeRF:280万张图片渲染整个旧金山街区|2022【谷歌Waymo】
发布人
UC Berkeley/Waymo/Google的研究人员利用280多万张图像训练了一个Block-NeRFs的网格,这是迄今为止最大的神经场景表征,能够渲染旧金山的整个街区 。 论文:Tancik, M., Casser, V., Yan, X., Pradhan, S., Mildenhall, B., Srinivasan, P.P., Barron, J.T., & Kretzschmar, H. (2022). Block-NeRF: Scalable Large Scene Neura
打开封面
下载高清视频
观看高清视频
视频下载器
鳍驱动的水下机器人|2018【Festo】
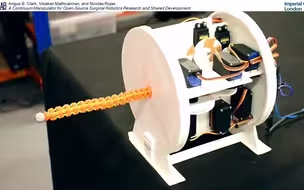
连续机械手-开源手术机器人研究|2021|帝国理工学院【T-MRB】
半机器甲虫:像机器人一样被控制的真正昆虫|2016【南洋理工大学】
六足攀爬机器人|2019【日本法政大学】
SELDA驱动的机器人腿跳跃|2022【IROS】
管道攀爬机器人:RSTAR|2022【Ben-Gurion University of the Negev】
用于微型飞行器的液体放大执行器|2022|英国布里斯托大学【Science Robotics】
为工作而生「人形机器人」digit|2021【 Agility Robotics】
异种机器人Xenobots 3.0:构建全球首个自我复制的活体机器人|2021【佛蒙特大学&塔夫茨大学&哈佛大学】
VR遥控机器人,超越你的身体|BEOMNI 1.0|2022 CES【Beyond Imagination】
现代即插即用机器人模块|CES 2022【韩国现代】
软连续体机械臂|ICRA 2022【ETH Zurich】
全自动番茄剪枝机器人Kompano|2021【荷兰Priva】
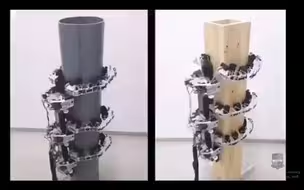
四足爬壁机器人-90度墙面、天花板倒立|2022|KAIST&美国伊利诺伊大学【Science Robotics】
人形机器人“朋友”护理现场演示|2022【川崎重工】
无人值守TIGER|2021【韩国现代汽车】
自动理发机器人|2020|Robot Hair Cut【Stuff Made Here】
全向移动履带式机器人|2011年【大阪大学】
机器人如何学会徒步|2022|ETH Zürich【Science Robotics】
自动布肌肉纤维「软体机器人」|2020【迪士尼Disney】
人形机器人ergoCub|2023【意大利技术研究院IIT】
机器人学导论|2008|Oussama Khatib【Stanford】
消除站立工作痛苦的辅助服|2020【日本アルケリス株式会社】
可穿戴肌肉Myoshirt:上肢日常生活辅助|2022【苏黎世联邦理工学院】
自主生物杂交鱼-由人类心脏细胞制成-像心跳一样游泳|2022【哈佛大学】
使用机器人实现水产养殖自动化|2021【MIT】
2020年电子动画展|Animatronics Showreel 2020【weareplaygrounds】
Halluc IIχ:与自然环境共存的未来交通工具|2015|山中俊治【東京大学】
学习猴子在树上荡来荡去|2022【英属哥伦比亚大学】
仿生蜜蜂BionicBee|2024【Festo】
谷歌AutoRT:具身智能大模型机器人大型编队|2023【Google Deepmind】
机器人地下挑战赛Ignition|2022【Open Robotics】
大型扑翼机器人:serenity演示及创造史|2021【俄罗斯Rarok-2】
MIT赵选贺讲座:磁性软体机器人【AIM2020 Workshop】
开源UniSim:神经闭环传感器模拟器|2023【waabi】
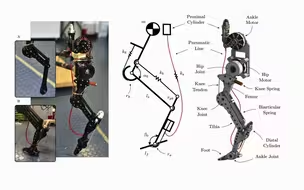
肌肉骨骼机器人|2022【大阪大学】
iCub3化身系统:人形机器人沉浸式远程操作|2024|Science Robotics【IIT】
自然多接触步行|2022|RA-L【Caltech】
波浪式游泳机器人:两波机制|2023【以色列本古里安大学】
Strandbeest进化|2021【Theo Jansen】