V
主页
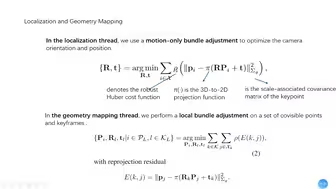
跑通ORB-SLAM2之相机标定
发布人
上学期跑通ORB-SLAM2时的一些步骤分享:利用ffmpeg将视频抽帧为图片,再选择适量适当的图片进行标定,程序为结合CSDN大佬们的分享整合而成,包括标定相机内参,标定相机畸变,计算重投影误差等。
打开封面
下载高清视频
观看高清视频
视频下载器
机器生活,机器人爱上女主人,每天给女主按摩
SLAM算法(浙软夏令营)废柴大学生的所作所为
TC-LIOM:Tightly-coupled Lidar Inertial Odometry and Mapping(Demo 02)
基于ROS Gazebo的多AUV协同导航
水吼得正确打开方式!即兴一下我跟贝斯随便编一段slam!极端嗓!嘶吼!
【雷达-相机协同定位】LiDAR-Vision Tightly Coupled Collaborative Positioning
手持slam简单汇总
【北理】结课作业——ROS小车记录
ICP代码讲解及答疑解惑
[IROS2024] I2EKF-LO:A Dual-Iteration Extended Kalman Filter Based LiDAR Odometry
我愿称之为2024年【计算机视觉与三维重建】入门天花板教程,北邮大佬用15个小时给它讲明白了,不愧是名校公开课!!!
频域分析中的相角为啥总求不对!相角为啥是arctan虚部/实部?一个视频告诉你!
控制的首一型与尾一型该怎么用,里面有哪些坑呢?
灵光Lixel采集指南 | 初始化启动篇
从数学角度与相角角度两大方向证明根轨迹是个圆!!!!——自动控制原理学练考:P95第1题
神经辐射场照亮动态SLAM:构建精细场景地图
SLAM基础
自动控制原理时域分析——控制研选120题:第29题——正弦信号引起的稳态误差
自动控制原理基础阶段每日一题2-9:拉氏变换与脉冲响应
《萝卜快跑传奇》——这是给控制科学与工程相关专业的就业铺路啊!!!
2天时间,我做出了一个条形升降结构
一个让众多控制考研学子心态爆炸的中科大频域分析题目——自动控制原理学练考P116例1
发明咬人玩具的人真是个天才,它是如何做到纯机械随机触发的
自动控制原理校正方法——控制研选120题(上岸题):第59题——串联滞后校正;让你快快乐乐学会滞后校正!!!
控制天团大佬做出的贡献与控制考研常见题型
大部分打工人最终的结局,早已注定
7月26日组会:2024CVPR-Photo-SLAM
微分方程组推导系统结构图很难吗?这个视频讲的明明白白的!自动控制原理学练考-P19例5
自动控制原理校正方法——控制研选120题:第66题——根轨迹积分、微分校正;最全的根轨迹校正题目讲解!!!
C++QT2024年最新版
自动控制原理:系统校正-串联超前校正(含做题步骤)
看控制宝藏题库——控制研选150题如何击碎控制考研题型见识不全的枷锁!!!
真正可用!灵光Lixel的实时点云有多靠谱?|手持激光雷达手持slam
当黑客遇到电脑白痴...
自动控制原理根轨迹——控制研选120题:第40题——参数根轨迹
机器人帅哥出现故障
延迟环节在频域分析中真的非常简单!《自动控制原理学练考》P113例6
每日自控题,考研稳准快-20
现代控制理论——控制研选120题:第87题——多输入多输出结构图建立状态空间模型
猫头鹰mini3 | 一款自主避障5mm障碍物的开源无人机