V
主页
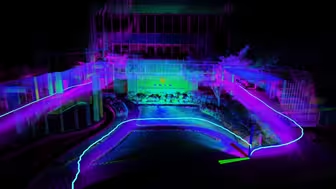
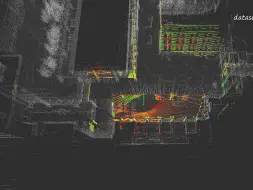
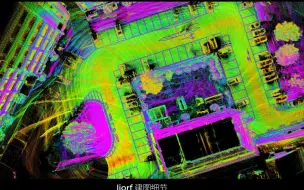
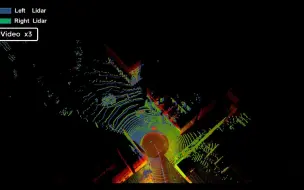
TC-LIOM:Tightly-coupled Lidar Inertial Odometry and Mapping(Demo 02)
发布人
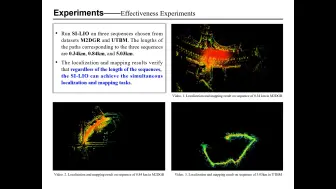
TC-LIOM:Tightly-coupled Lidar Inertial Odometry and Mapping. 自研紧耦合LIO算法,此视频主要测试针对宇树L1 4D雷达建图效果以及自采RS-32雷达大场景数据建图效果与LIO-SAM效果对比,算法无回环检测模块.
打开封面
下载高清视频
观看高清视频
视频下载器
TC-LIOM:Tightly-coupled Lidar Inertial Odometry and Mapping (Test Video 1)
ROS2 version of liorf and liorf_localization
Mid-360 mapping with liorf
基于LIO-SAM框架SLAM算法开发(八):建图之雷达视觉惯性融合建图-lviorf
基于LIO-SAM框架SLAM算法开发(四):建图之断点快速重建
基于LIO-SAM框架SLAM算法开发(七):建图之障碍物检测(测试Demo1)
基于LIO-SAM框架SLAM算法开发(三):定位之小场景定位算法
基于LIO-SAM框架SLAM算法开发(二):建图之算法优化(性能测试)
LS-Lidar Mapping With Liorf (8-Beam)
A Simple Lidar Odometry and Multi-Map SLAM(Demo 1)
基于LIO-SAM框架SLAM算法开发(六):建图之快速适配多雷达及GNSS设备
基于LIO-SAM框架SLAM算法开发(一):建图之算法优化
基于LIO-SAM框架SLAM算法开发(五):建图之低配R3Live效果实现
file_player_common:A Common File Player For the Bags
近期激光里程计(LO/LIO)领域值得关注的工作
An Efficient Tightly-Coupled LiDAR-Inertial Odometry via Single-Iteration IEKF
手持slam简单汇总
【雷达-相机协同定位】LiDAR-Vision Tightly Coupled Collaborative Positioning
我和Ai吵了一架
灵光Lixel采集指南 | 初始化启动篇
ICP代码讲解及答疑解惑
[AI视频]给AI一张后室的图,让它自由发挥,结果场景逐渐失控
AI预告片《复仇者联盟5:毁灭博士》
SLAM算法(浙软夏令营)废柴大学生的所作所为
slam手持三维激光扫描仪,古建筑数字化保护,建筑立面快速测量#建筑测量#slam三维扫描仪#手持激光雷达
无需SLAM算法,直接生成Gazebo仿真环境对应的高质量真值地图的工具 pgm_map_creator,手把手逐步详细讲解安装部署和使用方法【开源】
真正可用!灵光Lixel的实时点云有多靠谱?|手持激光雷达手持slam
【ai绘画神器,免登录无违禁词,懂得都懂,【出图没有限制❗让你为所欲为的3款免费次数超多的AI绘画神器❗最多一天免费出图500张
复杂环境下3D激光SLAM系统研究
[RA-L2023] CamMap:基于SLAM地图对齐方式的非重叠视场相机的外参标定
未解之谜-人类这种生物真的存在吗? - Neural Viz
SLAM导弹:防区外精准打击|F/A-18C
llama3.1国内可直接使用教程,405B堪称最强开源大模型,API无限调用,迪哥带你怎么玩,手把手教你打造自己的大模型!-人工智能、大模型、深度学习、NLP
7月6日组会:2024CVPR 中使用3DGS的SLAM
[IROS2024] I2EKF-LO:A Dual-Iteration Extended Kalman Filter Based LiDAR Odometry
教你用AI控制任何人的表情~【附一键整合包】
7月26日组会:2024CVPR-Photo-SLAM
机器人:这次真的大意了!
Navigation2:基础论文导读
用AI续写Windows开机音乐,又陌生又怀念😭,甚至还有点东方味儿