V
主页
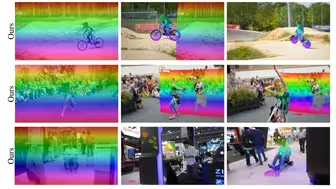
神经辐射场照亮动态SLAM:构建精细场景地图
发布人
神经辐射场照亮动态SLAM:构建精细场景地图#人工智能 #科技算法 #算法 #科技 #计算机 #计算机 在微信公众号@3DCV「3DCV」回复:「原论文」,获取论文代码和链接,赶快学起来! RoDyn-SLAM 是一个基于神经辐射场的深度 RGB-D SLAM 系统,旨在解决动态环境中鲁棒性差的问题。该系统利用运动掩码生成算法,融合光流掩码和语义掩码,有效过滤掉动态区域的采样射线,从而提高相机位姿估计的精度和静态场景重建的质量。为了进一步优化位姿估计的稳定性和鲁棒性,RoDyn-SLAM 设计了混合位姿优化算法,针对关键帧和非关键帧采用不同的优化策略。关键帧通过全局优化提升精度,而非关键帧则利用边缘扭曲损失增强几何一致性。实验结果表明,RoDyn-SLAM 在多个动态场景数据集上取得了优于现有神经 RGB-D SLAM 方法的性能,展现出其在动态环境下的强大潜力。RoDyn-SLAM 的提出为动态场景下的视觉 SLAM 研究提供了新的思路和方法,有望推动该领域的发展和应用。
打开封面
下载高清视频
观看高清视频
视频下载器
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
无需额外训练!SAMPro3D:零样本3D分割一切!
国防科大最新 | DistGrid:基于分布式神经辐射场阵列的大规模场景重建
CVPR2024 3D-GS再进化实时自适应视图渲染的未来!
ECCV'24开源 | 又快又好!6DGS重新定义6D物体位姿估计!
CVPR2024开源NetTrack:跟踪高动态物体!
R3LIVE:一个健壮、实时的Lidar-IMU-视觉紧耦合顶尖SLAM框架
MIT最新突破!SplaTAM:实现高速SLAM与实时3D渲染的全新方法!
OA-SLAM:在视觉SLAM中结合物体语义进行相机重定位[ISMAR 2022]
3DGS进化,高效高质量的GaussianPro来袭!
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
如何处理视觉SLAM长期定位中的外观变化和轨迹漂移?
UE4-NeRF的神经渲染系统,专为实时渲染而设计的大型场景
地图再也没有边界!腾讯发布无限3D场景生成!
代码开源!伦敦大学学院:DSP-SLAM:物体特征级SLAM
ECCV'24开源 !无惧遮挡、动态、光照变化!最鲁棒的3DGS震撼来袭!
中科院最新CityGaussian:VRAR时代的城市重建新标杆
中山大学最新提出 基于LiDAR-测距-惯性融合的机器人群体协同SLAM系统
ECCV'24 | 更快更准!Meta最新FPV-NeRF:将NeRF完美应用FPV!
首发!首个集成内容投影的实时结构光系统!
ICCV 2023 oral|一文看懂SLAM/ SfM遇到相似非回环场景应该如何处理
CVPR 2024开源 VSRD:无需LiDAR和标注使用2D渲染解决3D检测的新范式!
[RA-L2021] ,使用紧凑场景表示稀疏SLAM实时稠密建图!
清华搞定无人机!LVCP:雷达-视觉紧耦合协同定位!无需先验地图和初始位姿!
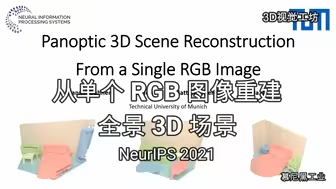
NeurIPS 2021:利用神经网络从单个 RGB 图像重建全景 3D 场景
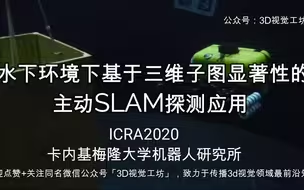
ICRA2020,卡内基梅隆大学机器人研究所,基于三维子图显著性的水下环境主动SLAM探测应用
香港大学&南科大!通过基于模型的学习实现直接基于点的端到端机器人导航
上海 AI Lab&同济大学!基于八叉树结构的3D高斯体渲染方法,实现一致的实时渲染性能
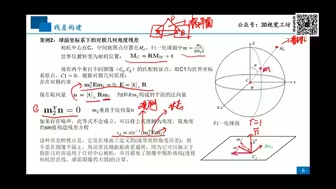
小白如何手写g2o优化? 残差构建、雅克比推导、优化函数
ECCV'24开源 | LocoTrack: 塑造SLAM新纪元!6倍加速! 跟踪一切最新SOTA!
终于有人教我写论文了!中山大学最新论文写作教程,只需20分钟教你写出一篇研究性论文&综述!
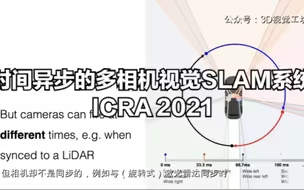
ICRA2021,时间异步的多相机视觉SLAM系统,效果大幅提升,更符合实际情况(代码即将开源)
IROS2020,动态场景中的速度和内存效率高的稠密 RGB-D SLAM
ICCV 2023|第一种稀疏的仅视觉的交叉视图定位方法!
港大火星实验室最新工作:鲁棒性的在线 LiDAR 惯性里程计初始化
Go!最新NeRF和SLAM结合开源方案!超越NICE-SLAM和DROID-SLAM!
GPA:凝视增强感知系统,视觉辅助无人机安全飞行(ICRA2021)
戴森机器人实验室发布SuperPrimitive:三维重建&视觉里程计&深度补全轻松搞定!
ICCV2021,浙大工作!遮挡环境下基于学习的未知空间占用分布预测,机器人运动轨迹更加光滑、安全!
[IROS2021] TUPPer-Map:用于 3D 语义建图的时间和统一全景感知