V
主页
京东 11.11 红包
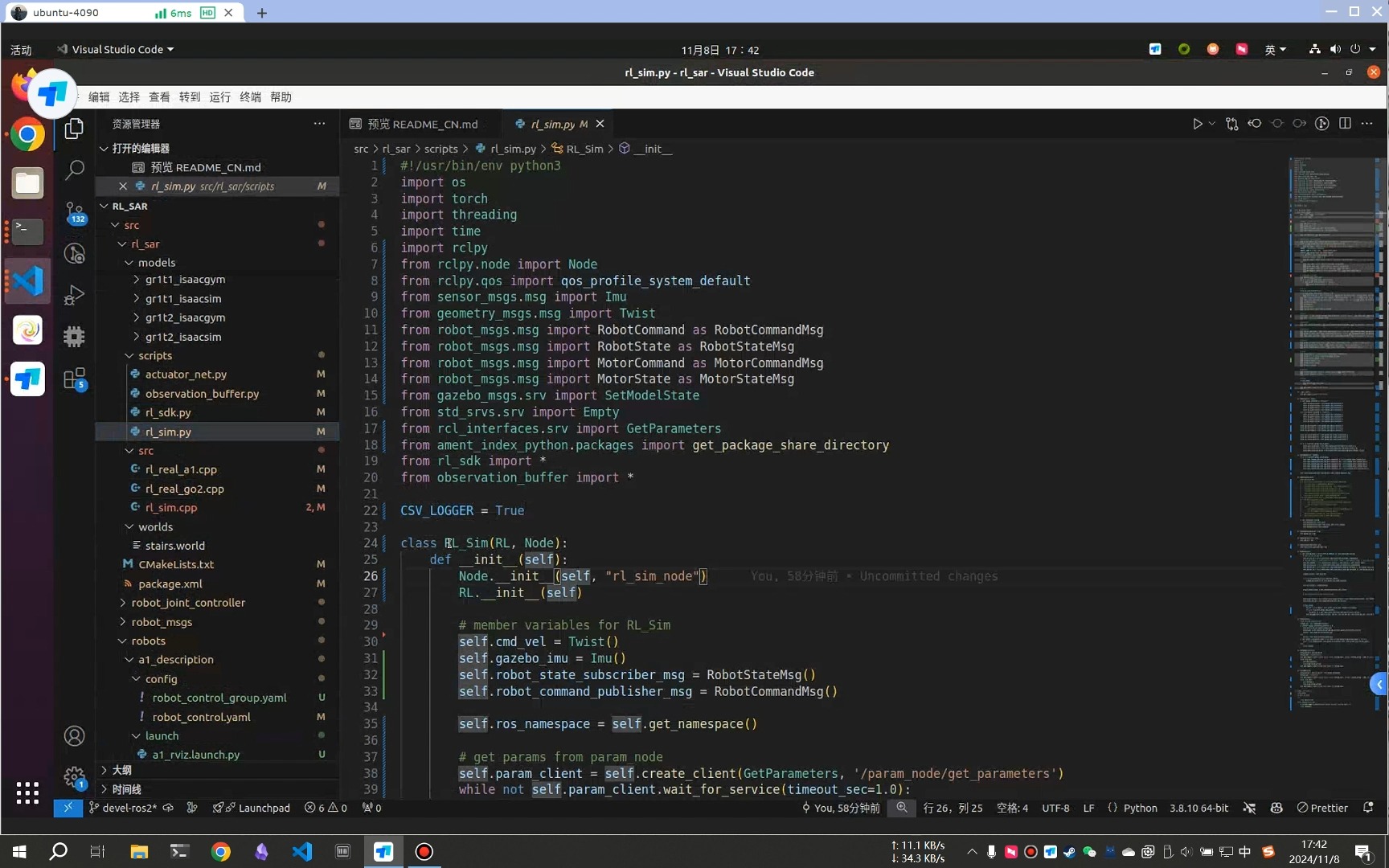
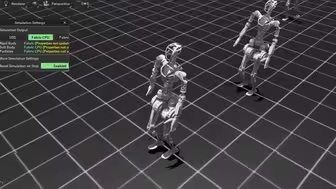
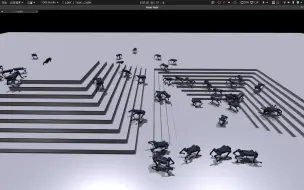
如何用rl_sar采集训练执行器网络的数据
发布人
https://github.com/fan-ziqi/rl_sar
打开封面
下载高清视频
观看高清视频
视频下载器
IsaacLab实现四足机器人AMP,视频训了1000轮,开源链接在简介
rl_sar现已支持go2,欢迎试用
Isaaclab-Gazebo仿真
【通用】人形机器人RL策略Gazebo二次仿真框架
【开源】强化学习sim to sim
基于IsaacLab的人形机器人强化学习
【rl_sar】四足/人形机器人强化学习算法的仿真验证与实物部署框架
四足机器人强化学习sim to real(walk these ways)
在isaaclab中开发viplanner端到端导航
机器人强化学习再无环境问题-傻瓜式docker配置脚本
在IsaacLab中跑ViPlanner,代码正在PR
Isaacsim/IsaacLab中URDF-USD模型转换,碰撞体查看与修复
四足机器人多步态强化学习(仿真手柄控制)
强推!这绝对是B站最全的(python+机器学习+深度学习)系列教程,草履虫都能学会,学不会你来锤爆我!人工智能/机器学习/深度学习/python/神经网络
复现human2humanoid
在IsaacLab中的UnitreeA1上重放AMP动捕数据
【中文机翻】NVIDIA Isaac Gym
IsaacLab交流群及文档更新说明
使用ROS2-Control + RL来控制四足机器人
四足机器人纯本体感知强化学习
终于可以站起来了,就是lstm训练的慢了好多…
【自制】ROS机器人四电机驱动控制板
欢迎加入Robot Developer Discord社群
g1套humanoid_gym
issacgym sim2sim
动画讲解深度强化学习(RL、Q-网络、策略优化、大模型算法入门教程)
强化学习四足机器人二
issacgym 训练400次的效果 强化学习 人形
【基于深度强化学习的冠军级别无人机竞速】强化学习和模型预测控制MPC中英字幕18讲!
右边两足走路也是双足行走
Quest2-OpenTeleVision-isaacgym
isaacsim中文文档(在线翻译)
Diffusion Policy 结合 PPO 模仿+强化 (下)
不愧是李宏毅老师讲的【强化学习】简直太详细了!全程干货,通俗易懂,看完就跑通!(人工智能|机器学习|深度学习|强化学习)
测试行走站立切换和站立抗冲击
【中文字幕】Reinforcement Learning - Steve Brunton
【中文机翻】现代机器人学 Modern Robotics
jaka机械臂+单目视觉 | 实现不同颜色物块的位置角度检测并分拣
尼龙3D打印摆线减速器【稚晖君方案】
双热点强强联合的发文方向:Transformer+强化学习!