V
主页
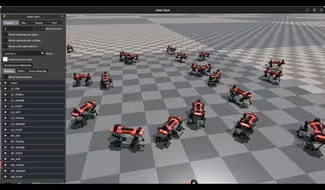
基于IsaacLab的人形机器人强化学习
发布人
基于IsaacLab的RL训练框架 支持傅利叶人形机器人,及宇树/Anymal等 https://github.com/fan-ziqi/robot_lab
打开封面
下载高清视频
观看高清视频
视频下载器
机器生活,机器人爱上女主人,每天给女主按摩
双足机器人isaacgym训练后sim2sim到mujoco扭成麻花了
【通用】人形机器人RL策略Gazebo二次仿真框架
Isaaclab强化学习训练仿真:未来的丧尸电影还需要群演吗?
伴侣机器人来了,这真的是中国科技界很有趣的事情!
双足机器人强化学习humanoid-gym sim2sim详细学习过程,Openloong的urdf为例
机器人强化学习再无环境问题-傻瓜式docker配置脚本
四足机器人强化学习sim to real(walk these ways)
【开源】强化学习sim to sim
两极反转!“机器人娇娇”竟是真人扮演
卡斯阿姨被神奇大白机器人奖励三天三夜,彻底沦陷
强化学习导航:仿真环境训练及ROS实车部署
四足机器人多步态强化学习(仿真手柄控制)
我 大 秦 军 工 ,懂 些 科 技 也 很 合 理 吧 !
[达妙开源系列-四转四驱] 方案测试 后续加滑环改机加 本月陆续开源
电赛E题 树莓派写完的 搞了有一会 队友调的机械臂(自己打印的)纯手搓
高精密减速机国产化:摆脱牵制,拒绝高价,杜绝拖延!
【自制】ROS机器人四电机驱动控制板
人形机器人强化学习训练方法,为什么腿是直着的?humanoid gym
斯坦福推出“TTT新架构”!超越Transformer与Mamba,让模型{学会学习}!
ESP32开发板-跟着稚晖君做的又一个项目
Isaac Lab中文版文档正式上线!
重生之变成骷髅,强化学习教我行走
中国深圳 双足机器人 SA01 | 价格已屠杀到3.85万元 | 机器人圈 | 还有谁能卷过中国 | 机器人 | 人工智能 | 足式机器人 | 性价比机器人 |
日本老龄化社会,又有机器人找到了新工作,由西日本旅客铁道部开发用于火车线路维护,由人远程操控,可以配备不同的工具在12米的高度作业,举起40公斤的物体
四足机器人无外部传感器上下20cm台阶
尼龙3D打印摆线减速器【稚晖君方案】
OpenLoong开源双足机器人,想强化学习但是我的urdf变僵尸了
Nvidia推出新的人工智能工具,加速人形机器人的开发进程
人形机器人,强化学习sim 2 sim,humanoid gym 训练方法
大家好,我是天链人形机器人T1 Pro,请欣赏我的高光时刻,我在西安曲江国际会议中心等你哦
【劲爆】Omnigrasp: 仿真人形机器人抓取多样化物体
青龙机器人开源(OpenLoong) 爬楼梯测试
人形机器人巨头放弃双足,官宣转型轮式,机器人革命来了
从想象力走向生产力
来自深圳的场地道具训练第一弹技术爆料!港科自定义控制器丝滑兑矿!
isaacgym强化学习示例
仅一个简单机制,防止绝大多数深度学习模型权重过大问题!不得不学的权重剪裁手法 #持续学习 #强化学习 #神经网络
DeeperMimic:(基于实时动画的)四足机器人多技能控制
上海世界人工智能大会上的人形机器人,是不是很逼真?