V
主页
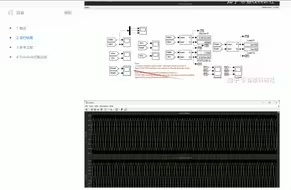
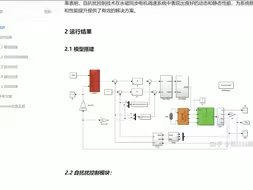
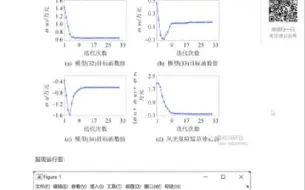
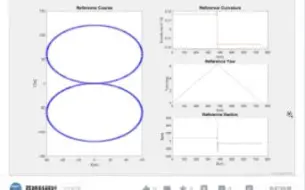
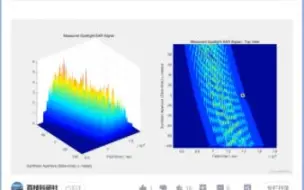
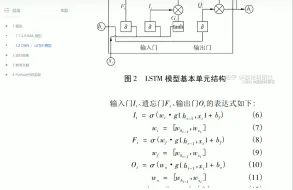
水下机器人采用全局积分滑模控制进行水平轨迹跟踪控制(Matlab代码实现)
发布人
水下机器人采用全局积分滑模控制进行水平轨迹跟踪控制(Matlab代码实现)
打开封面
下载高清视频
观看高清视频
视频下载器
非线性模型预测控制MPC问题求解研究(Matlab代码实现)
基于事件触发机制的孤岛微电网二次电压与频率协同控制仿真模型(Simulink仿真实现)
基于Lyapunov的控制器设计用于自主水下车辆(AUV)的轨迹跟踪,对于欠驱动的自主水下车辆(AUV)进行二维轨迹跟踪的仿真Lyapunov控制器设计(Sim
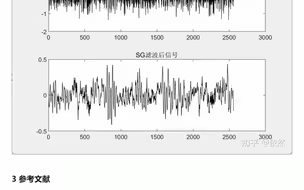
【SG滤波】三阶滤波、五阶滤波、七阶滤波(Matlab代码实现)
在双母线系统中使用STATCOM进行无功补偿,STATCOM的控制器基于PI控制器(Simulink仿真实现)
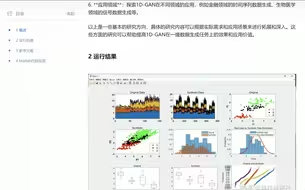
基于1D-GAN生成对抗网络的数据生成方法研究(Matlab代码实现)
【水下机器人建模】基于QLearning自适应强化学习PID控制器在AUV中的应用研究(Matlab代码实现)
基于自抗扰控制ADRC的永磁同步电机仿真模型(Simulink仿真实现)
【无人机路径规划】基于深度强化学习的多无人机辅助边缘计算网络路径规划(Matlab代码实现)
实时傅立叶单像素成像研究(Matlab代码实现)
【永磁同步电机】基于SVPWM的三电平逆变器PMSM速度控制(Simulink仿真实现)
【路径规划】动态路径规划(Matlab代码实现)
【无敌方法创新!】基于神经网络的数据驱动迭代学习控制(ILC)算法,用于具有未知模型和重复任务的非线性单输入单输出(SISO)离散时间系统的无人车的路径跟踪(M
基于模型参考自适应的永磁同步电机仿真模型(Simulink仿真实现)
控制四旋翼飞行器以进行多目标航点导航的MPC算法(Matlab代码实现)
【车间调度】基于卷积神经网络的柔性作业车间调度问题的两阶段算法(Matlab代码实现)
3D表面粗糙度和接触的可视化(Matlab代码实现)
接触网机器人:设计和控制由两个四旋翼飞行器驱动的电缆(Matlab代码实现)
基于三相pq理论的单相并联有源电力滤波器能够在单相系统中减轻谐波电流,并补偿无功功率(Simulink仿真实现)
【状态估计】观测信号(包括异常值)的状态估计方法(Matlab代码实现)
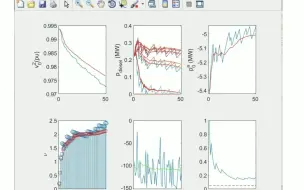
基于纳什谈判理论的风–光–氢多主体能源系统合作运行方法(Matlab代码实现)
【2024年数维杯A题】国际大学生数学建模挑战赛——多源机会信号建模与导航分析(思路、代码......)
【无人车】用于无人地面车辆的路径跟踪算法(Matlab代码实现)
基于PSO的自平衡机器人自整定PID控制器(Matlab代码实现)
【改进的多同步挤压变换】基于改进多同步挤压的高分辨率时频分析工具,用于分析非平稳信号(Matlab代码实现)
【信号处理】SAR 信号处理(Matlab代码实现)
【负荷预测】长短期负荷预测(Matlab代码实现)
基于ARIMA-CNN-LSTM预测模型研究(Python代码实现)
【LSTM-Attention】基于长短期记忆网络融合注意力机制的多变量时间序列预测研究(Matlab代码实现)
基于卡尔曼滤波KalmanFilter的估计估计研究(Matlab代码实现)
【GRNN-RBFNN-ILC算法】【轨迹跟踪】基于神经网络的迭代学习控制用于未知SISO非线性系统的轨迹跟踪(Matlab代码实现)
多因素蚁群算法的移动机器人路径规划研究(Matlab代码实现)
连接到无限电网的小型风电场的无功功率控制(Simulink)
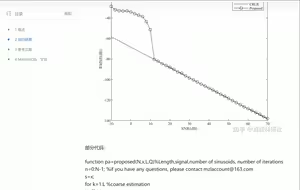
一种对真正正弦波频率进行准确估计的方法(Matlab代码实现)
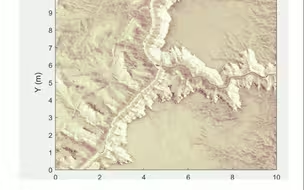
【通过粒子滤波进行地形辅助导航】用于地形辅助导航的粒子滤波器和 PCRB研究(Matlab代码实现)
【智能电网随机调度】智能电网的双层模型时间尺度随机优化调度(Matlab代码实现)
【无人机】基于Koopman算子合成的CBF进行碰撞避免研究(Matlab代码实现)
【混合多电平逆变器】PMSM 使用混合逆变器进行速度控制,通过 2 级和 3 级逆变器开关进行转换(Simulink仿真实现)
【故障诊断】齿轮系统的传递路径分析(TPA)(matlab实现)
【无线可充电传感器网络(WRSN)】公交网络辅助的无人机调度,用于无线可充电传感器网络的可持续充电(Matlab代码实现)