V
主页
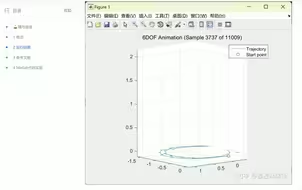
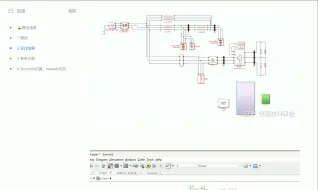
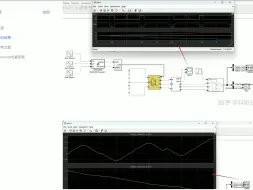
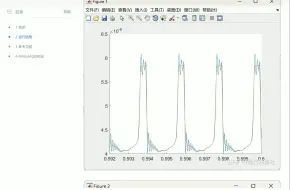
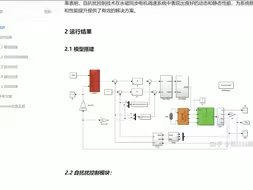
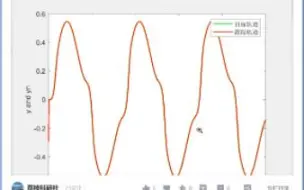
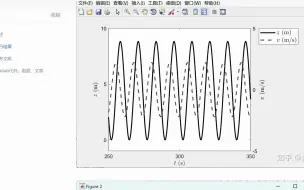
基于Lyapunov的控制器设计用于自主水下车辆(AUV)的轨迹跟踪,对于欠驱动的自主水下车辆(AUV)进行二维轨迹跟踪的仿真Lyapunov控制器设计(Sim
发布人
基于Lyapunov的控制器设计用于自主水下车辆(AUV)的轨迹跟踪,对于欠驱动的自主水下车辆(AUV)进行二维轨迹跟踪的仿真Lyapunov控制器设计(Simulink仿真、Matlab代码实现)
打开封面
下载高清视频
观看高清视频
视频下载器
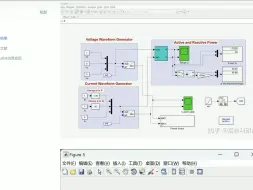
在双母线系统中使用STATCOM进行无功补偿,STATCOM的控制器基于PI控制器(Simulink仿真实现)
【无敌方法创新!】基于神经网络的数据驱动迭代学习控制(ILC)算法,用于具有未知模型和重复任务的非线性单输入单输出(SISO)离散时间系统的无人车的路径跟踪(M
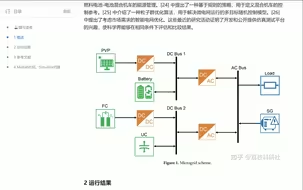
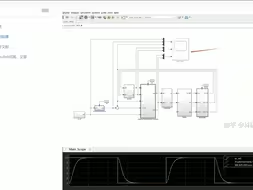
【AC/DC微电网的能源管理策略】微电网仿真模型包括光伏发电机、燃料电池系统、超级电容器和直流侧的电池,包括电压源变换器(VSC),用于将微电网的直流侧与交流侧
北京公交部分车辆结局
基于事件触发机制的孤岛微电网二次电压与频率协同控制仿真模型(Simulink仿真实现)
【使用卡尔曼滤波器将陀螺仪和加速度计的读数融合,以获取IMU的姿态(四元数)】实现了所谓的“零速度更新”算法,用于行人跟踪(步态跟踪)(Matlab代码实现)
一种用于永磁同步电机PMSM的自适应状态反馈速度控制器(Simulink仿真实现)
如何调试控制器才能省电?
粒子群算法对pi控制器进行参数优化,随时优化pi参数以控制直流无刷电机转速(Simulink仿真实现)
基于级联广义积分器(CGI)的谐波信号提取方法模型(Simulink仿真实现)
风储VSG-基于虚拟同步发电机的风储并网系统Simulink仿真
【在dqo坐标系中的主动和无功功率】用于不同微电网之间的功率交换(simulink仿真实现)
基于模型参考自适应的永磁同步电机仿真模型(Simulink仿真实现)
基于VSC的STATCOM模型,使用三电平中点钳式电压源变换器进行电压调节的STATCOM模型,在模拟过程中,电压设定值被改变,减小和增加交流电压,STATCO
基于自抗扰控制ADRC的永磁同步电机仿真模型(Simulink仿真实现)
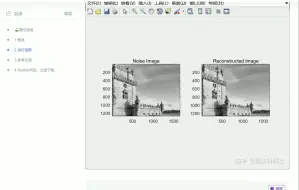
【通过ADMM进行TV-L1去噪】一种用于总变差去噪的交替方向法研究(Matlab代码实现)
霍尔坏了编程控制器也能正常使用,没有顿挫感#编程控制器
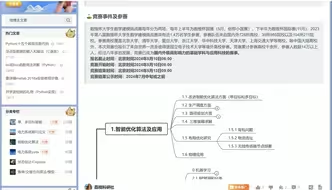
【2024年数维杯A题】国际大学生数学建模挑战赛——多源机会信号建模与导航分析(思路、代码......)
连接到无限电网的小型风电场的无功功率控制(Simulink)
【永磁同步电机】基于SVPWM的三电平逆变器PMSM速度控制(Simulink仿真实现)
工程自定义控制器控制演示——起源Origin2024
【故障诊断】齿轮系统的传递路径分析(TPA)(matlab实现)
基于自抗扰控制ADRC的永磁同步电机仿真模型(Simulink仿真实现)
惊喜魔法水果变出彩色车辆-学习颜色和认识车辆
基于BP神经网络的轨迹跟踪研究(Matlab代码实现)
使用粒子滤镜跟踪影片中的红色对象研究(Matlab代码实现)
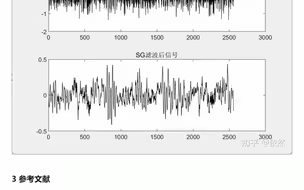
【SG滤波】三阶滤波、五阶滤波、七阶滤波(Matlab代码实现)
基于模型预测控制对PMSM进行FOC控制,模拟控制了PMSM的速度(Simulink仿真实现)
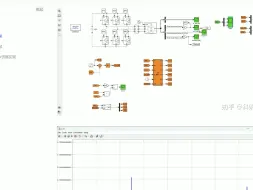
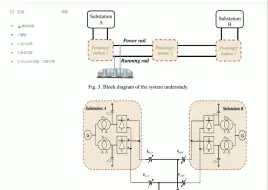
最新高铁研究!带你看世界!电动铁路牵引系统中再生能量量化分析【直流牵引系统,电力列车模型】电动铁路牵引系统中再生能量的量化分析(Simulink仿真实现)
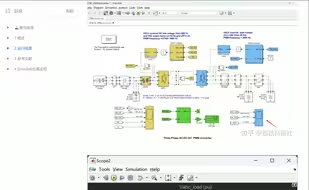
【三相AC-DC-AC PWM变换器】基于三相PWM VSC的电源供应SimPowerSystems模型研究(Simulink仿真实现)
【永磁直线同步发电机的建模与设计分析】分析起伏浮标波浪能转换器的取力器性能研究(Matlab代码实现)
日本航母甲板人员车辆
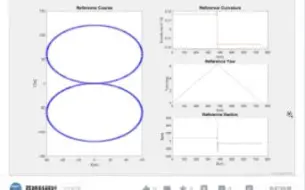
【无人车】用于无人地面车辆的路径跟踪算法(Matlab代码实现)
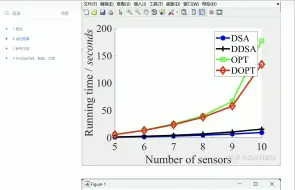
【无线可充电传感器网络(WRSN)】公交网络辅助的无人机调度,用于无线可充电传感器网络的可持续充电(Matlab代码实现)
Vision pro游戏体验有救:第三方控制器使游戏性大增!
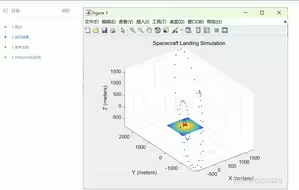
【卡尔曼滤波跟踪】使用卡尔曼滤波模拟航天器降落在月球表面可视化 3D 轨迹(Matlab实现)
光储并网直流微电网simulink仿真模型,光伏采用mppt实现最大功率输出研究
防火门控制器相关考点你学会了吗?
RANE PERFORMER 电动转盘4通道STEM控制器
电动车万能控制器的正确理解