V
主页
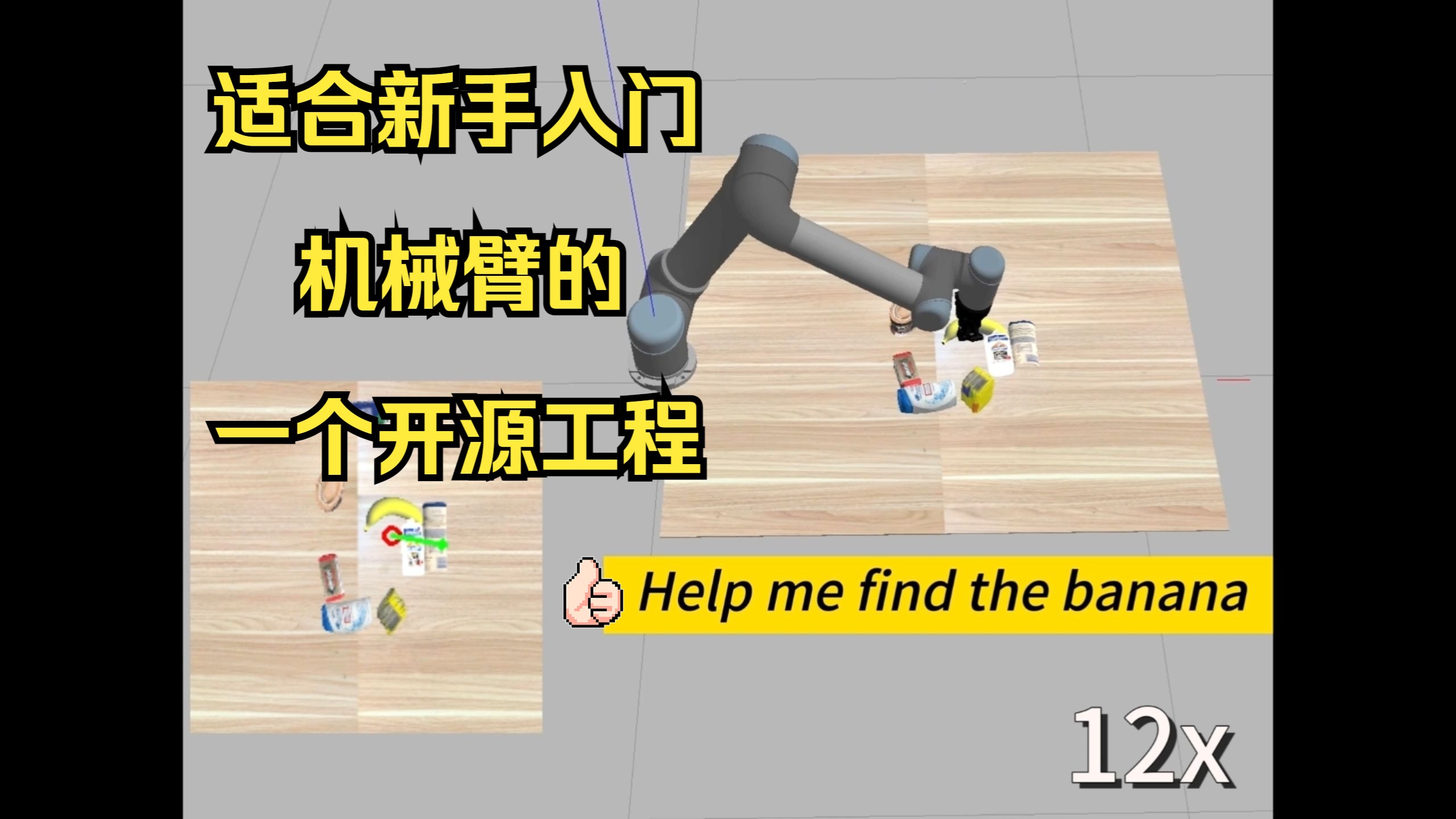
杂乱环境下视觉语言多模态的协同推抓demo展示
发布人
论文accept~~~ 仓库地址:https://github.com/HDU-VRLab/Ground4Act 十月将开源出所有工程,争取录制视频讲解。 代码模块化,控制端和算法端解耦,希望能帮助朋友们以项目实战的方式更快的入门机械臂~
打开封面
下载高清视频
观看高清视频
视频下载器
机械臂视觉语言抓取初步尝试--->请帮我抓香蕉
《UR10推抓协同:复杂环境下的指定目标抓取》
UR机械臂学会理解人类语言,实现目标物体的推抓协同
carla环境下基于强化学习的自动驾驶
机械臂执行推动作分散杂乱场景(人为点击版)
交互玩ROS:ChatGPT与机器人合作解决任务的初次尝试
抓取不止!Ubuntu 18.04下UR5机械臂搭建Gazebo环境|开源分享
《6分半的机械臂新手村学习总结》
移动小车在实际环境下的性能测试:建图、导航、定位
今天把我做的这个机械臂开源
检测/分割/图结构/多模态大模型等场景如何套用Transformer结构,Transformer模型在视觉任务中的应用全详解!
【Open-X-Embodiment续】代码实现RT-1-X模型推理和结果分析
比啃书高效多了!清华高翔博士亲授【视觉SLAM十四讲】视频教程全集,一起来体验醍醐灌顶的感觉!
刷到概率0.0000001%
Grasp-Anything:利用大模型生成的大规模机械臂数据集
宇树Z1机械臂Gazebo仿真控制
机械手爬行
franka emika 机械臂视觉伺服+阻抗控制
【机器视觉-Halcon】手眼标动+工业相机采集图像教程-全网首发 附源码快速上手【转载】【侵删】(C#/视觉教程/实战/编程/小白)Z0009
2024全网首发机器视觉VisionPro零基础教程+C#联合编程【持续更新】(C#/工业相机/VP/康耐视VisionPro)B1395
机器人除了炒菜,还能够应用于哪些超乎你想象的领域?
视觉SLAM VIO开源代码解析
20届智能车双车赛题浅浅完个赛吧!
什么是机器学习和视觉识别?费曼40年前就回答了!
25赛季培训 || 视觉组第二次培训——opencv基础(配置环境、Mat、图片的读取输出)
【开源】宇树Unitree Go2四足机器人/机器狗Isaac Sim/Isaac Lab ROS2仿真平台
真的超容易“搞深度学习神经网络到底怎么改代码的啊?”复旦博士教我用一本书搞定!
Flux微调模型终极对比:PixelWave, Shuttle 3 Diffusion, StoiqoNewreality, FluxRealistic
Touchdesigner作品分享 | 声音可视化(练习)
学术报告-大语言模型的知识学习研究-黄书剑-南京大学自然语言处理组
视觉SLAM进阶-从零开始手写VIO
数学之美—编程可视化HypozykloidTorus(内旋轮换面)的震撼视觉,仿佛看到了中国的古典建筑
我,仿真?速成,果真!机器人仿真,从Solidworks到ROS2
视觉模块实现无线图传最简单的方式了吧
数学之美—隐式曲面编程可视化,仿佛浩瀚夜空中的星
宇树Go2基本动作编舞测试
UR机械臂在gazebo仿真中推散物体分离场景
CLiport抓取理解:要求机械臂去抓什么(What)和去哪抓(Where)
【动态视觉鉴赏】头戴式耳机商业广告宣传片,C4D耳机数码产品三维创意视觉动画,蓝牙耳机CG动画设计,数码产品3d动画建模渲染
IROS 2024 | 苏黎世大学全新视觉里程计,性能暴涨60%!