V
主页
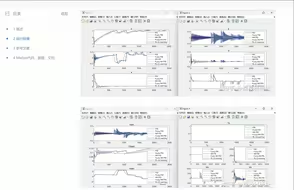
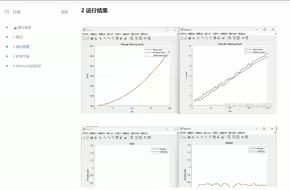
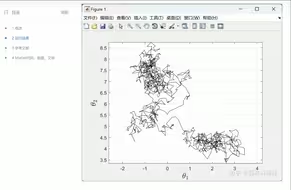
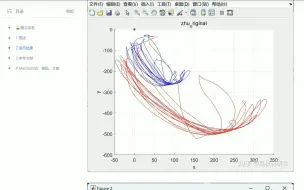
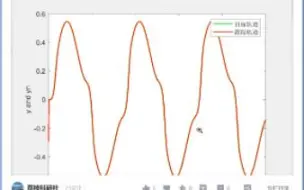
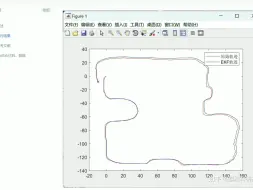
【使用卡尔曼滤波器将陀螺仪和加速度计的读数融合,以获取IMU的姿态(四元数)】实现了所谓的“零速度更新”算法,用于行人跟踪(步态跟踪)(Matlab代码实现)
发布人
【使用卡尔曼滤波器将陀螺仪和加速度计的读数融合,以获取IMU的姿态(四元数)】实现了所谓的“零速度更新”算法,用于行人跟踪(步态跟踪)(Matlab代码实现)
打开封面
下载高清视频
观看高清视频
视频下载器
【IMU数据与GPS融合的预积分方法】基于流形的IMU预积分,用于高效的视觉惯性最大后验估计、SE3姿势区分为IMU(Matlab代码实现)
matlab安装教程(matlab下载安装教程必看全新内容)
【GPS+INS在MAV导航上的融合】基于间接卡尔曼滤波的IMU与GPS融合MATLAB仿真(IMU与GPS数据由仿真生成)(Matlab代码实现)
【无人机】原始卡尔曼滤波用于跟踪3D空间中的无人机(Matlab实现)
【升级版本】基于多目标粒子群算法的微电网优化调度【风光、储能、柴油、燃气、电网交互】(Matlab代码实现)
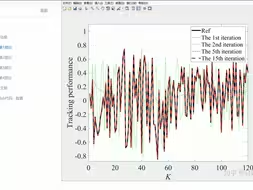
【GRNN-RBFNN-ILC算法】【轨迹跟踪】基于神经网络的迭代学习控制用于未知SISO非线性系统的轨迹跟踪(Matlab代码实现)
【水下机器人建模】基于QLearning自适应强化学习PID控制器在AUV中的应用研究(Matlab代码实现)
基于卡尔曼滤波KalmanFilter的估计估计研究(Matlab代码实现)
【扩散映射+线性卡尔曼滤波+Koopman算子】一种用于高维非线性随机动力系统状态估计的非参数方法,按照具有各向同性扩散的梯度流演化(Matlab代码实现)
基于观测器的单侧Lipschitz非线性多智能体系统时变队形自适应跟踪(文献+matlab 代码)
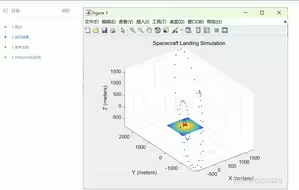
【卡尔曼滤波跟踪】使用卡尔曼滤波模拟航天器降落在月球表面可视化 3D 轨迹(Matlab实现)
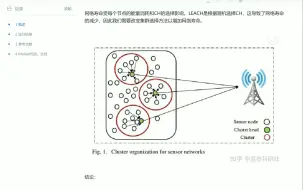
用于增加无线传感器网络(WSN)寿命的改进型LEACH协议(Matlab代码实现)
基于量子粒子群算法(QPSO)优化LSTM的风电、负荷等时间序列预测算法(Matlab代码实现)
【故障诊断】用于轴承故障诊断的性能增强时变形态滤波方法及用于轴承断层特征提取的增强数学形态算子研究(Matlab代码实现)
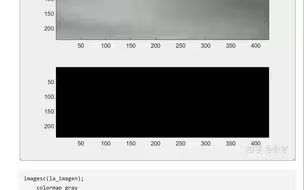
使用图像处理跟踪瞳孔(Matlab代码实现)
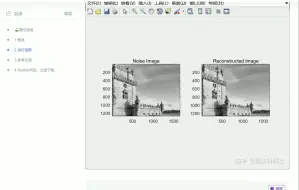
【通过ADMM进行TV-L1去噪】一种用于总变差去噪的交替方向法研究(Matlab代码实现)
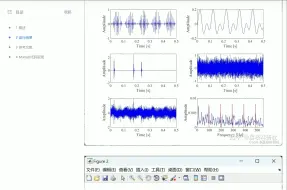
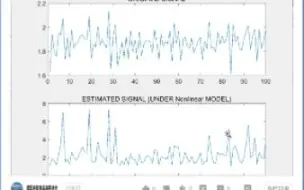
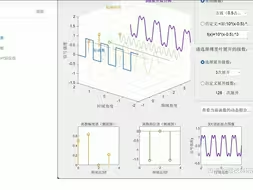
【改进的多同步挤压变换】基于改进多同步挤压的高分辨率时频分析工具,用于分析非平稳信号(Matlab代码实现)
线性离散时间系统的H∞跟踪控制:基于无模型Q学习的设计(Matlab代码实现)
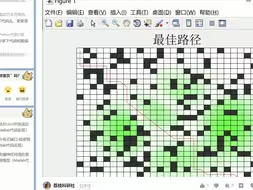
多因素蚁群算法的移动机器人路径规划研究(Matlab代码实现)
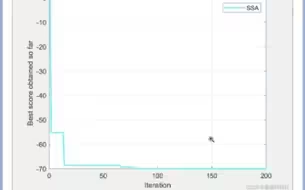
【单目标优化算法】樽海鞘群算法(Matlab代码实现)
【SCI】【运动跟踪】基于惯性传感器的运动跟踪方法研究(Matlab代码实现)
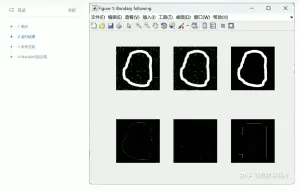
【图像处理】图像表示(边界跟踪和链代码)和主成分描述(matlab实现)
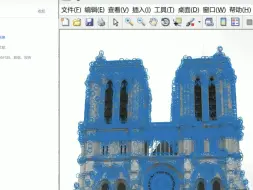
使用哈里斯角Harris和SIFT算法来实现局部特征匹配(Matlab代码实现)
基于BP神经网络的轨迹跟踪研究(Matlab代码实现)
【基于全局路径生成最优路径】基于D* Lite和横向避障算法无人驾驶地面车辆的路径规划(Matlab代码实现)
【EI复现】基于粒子群算法的风电-水电(抽水蓄能)联合优化调度研究(Matlab代码实现)
具有梯度流的一类系统的扩散图卡尔曼滤波(Matlab代码实现)
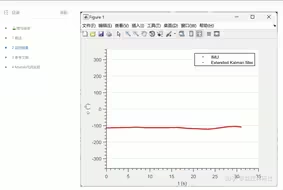
【GPS与高速传感器、尔曼滤波器】使用IMU + GPS数据的姿态和位置参考系统(Matlab代码实现)
【状态估计】无味卡尔曼滤波研究(Matlab代码实现)
【信息矩阵融合算法】【融合】【Dempster-Shafer】自动驾驶应用中环境感知的目标级融合研究(Matlab代码实现)
Matlab机器学习从基础到理论(全版加代码课件)这绝对是B站最全面的MATLAB机器学习入门课程!_神经网络/支持向量机/遗传算法/决策树与随机森林
2024国赛:50多种模型Matlab/Python代码合集!含Matlab程序包、Python程序包,24国赛代码免调试
matlab下载安装教程(matlab软件安装必看全新内容)
从可观测性的角度研究基于扩展卡尔曼滤波器(EKF)的同时定位与地图构建(SLAM)中的不一致性问题(Matlab代码实现)
基于灰狼优化算法(GWO)无人机路径规划研究(Matlab代码实现)
基于FFT算法的MTALAB傅里叶级数3D可视化研究(Matlab代码实现)
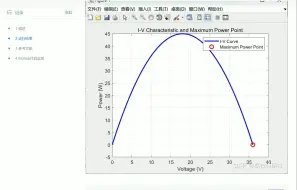
太阳能电池的最大功率点跟踪(MPPT)(Matlab代码实现)
具有梯度流的一类系统的扩散图卡尔曼滤波(Matlab代码实现)
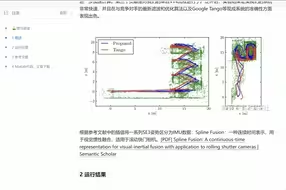
使用卡尔曼融合GPS数据和加速度数据,一方面提升定位输出速率,一方面可以再GPS信号不好时通过IMU惯导辅助纠正路线,加速度数据已经转为惯导坐标系下,并做了滤波
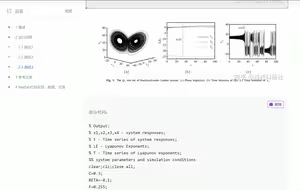
用于确定分数阶系统(FOS)的Lyapunov指数谱,包括分数阶Lorenz系统、4D分数阶Chen系统和分数阶Duffing振荡器(Matlab代码实现)