V
主页
京东 11.11 红包
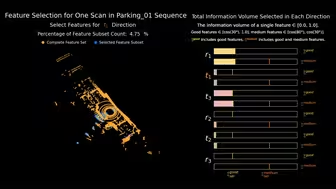
CAD-Mesher: A Convenient, Accurate, Dense Mesh-based Mapping Module in SLAM for
发布人
CAD-Mesher: A Convenient, Accurate, Dense Mesh-based Mapping Module in SLAM for Dynamic Environments 论文已投稿至T-MM 2025 项目主页:CAD-Mesher (yaepiii.github.io)
打开封面
下载高清视频
观看高清视频
视频下载器
LOAM原理及代码详解 | 这也是我一直以来想跟大家分享的!
IROS'24开源 | 全新动态V3D-SLAM:3D语义几何投票的动态鲁棒RGB-D SLAM
浙大章国锋团队最新开源NIS-SLAM:突破神经隐式语义RGB-D SLAM的极限!
ChainSLAM实时建图演示
A Compact LiDAR Odometry and Mapping with Dynamic Removal
SLAM为什么需要IMU
TRLO: An Efficient LiDAR Odometry with 3D Dynamic Object Tracking and Removal
轮式里程计激光里程计视觉里程计区别是什么
SLAM为什么需要机器学习
无人驾驶建图定位ndt定位快速入门:部署、测试,全过程精细讲解(主讲录制人:严正清;技术小组:小组:陈云、贾岚博、刘志强、张连会)
SLAM-Viewer,SLAM便捷可视化小工具
SLAM为什么需要闭环检测
书接上回!LOAM的进阶版LeGO-LOAM原理及代码详解来了!
为什么需要多传感器融合
多传感器融合SLAM松耦合与紧耦合
华山区大范围激光视觉惯性SLAM建图
火星上的SLAM 非结构环境中的飞行器建图和定位 太空机器人
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
视觉惯导融合SLAM内外参标定是关键
FI-SLAM: Feature Information-Based Robust and Efficient Vision-Inertial-Aided Li
这么简单好用的 ROS 定位方法,确定不要试一下吗?!
《ROS 2机器人开发从入门到实践》7.3.2编写launch并启动导航
听劝不要轻易入坑SLAM
机器人多传感器融合
除了激光SLAM和视觉SLAM还有哪些研究方向
多摄像头多地图视觉惯性定位系统 (VILO):实时精准定位方案
SLAM Zero to One
动态环境挑战、动态和语义SLAM、全身控制与移动操纵、长序列移动操作等尖端话题深入探讨
Talk | 香港科技大学黄华健:高写实三维数字化时代下的在线同时定位和建图
《ROS 2机器人开发从入门到实践》7.2.1构建第一章导航地图
卡尔曼滤波到底是要干啥?把握住这个核心思想就能完全理解!
Patchwork:经典点云地面分割框架!简单又实用!
RING#: 基于等变BEV特征的视觉激光通用全局定位
机器学习与SLAM怎么结合
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
SLAM系统的2种设计范式
DOM-60 为机器人带来前所未有的感知能力
VINS算法视觉惯导融合SLAM
今天把我做的这个机械臂开源
IROS' 24 开源|GV-Bench:面向长期回环检测的几何验证评估