V
主页
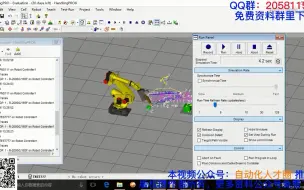
60 发那科机器人试运行
发布人
发那科机器人编程教程
打开封面
下载高清视频
观看高清视频
视频下载器
31 发那科机器人寄存器的使用
32 发那科机器人位置寄存器的使用
28 发那科机器人定位指令讲解
08 发那科机器人PR寄存器讲解
机器人法则不再只是保护人类
62 发那科机器人与三菱q plc cclink设置
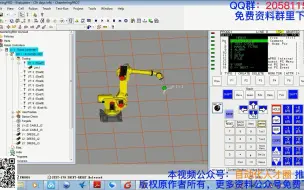
77 发那科机器人用运动控制制面板
01 发那科机器人公司及产品介绍
71 发那科机器人用标签在对象上加注释
29 发那科机器人数字量io的使用
34 发那科机器人创建机器人程序
72 发那科机器人用工人操作面板操作人物
53 发那科机器人恢复机器人程序
15发那科机器人用户坐标系的使用和三点法标定
50 发那科机器人在程序中使用跳转语句JMP-LBL
43 发那科机器人在程序中删除程序行
41 发那科机器人在程序中使用注释
52 发那科机器人备份机器人程序
27 发那科机器人运行速度讲解
第十九期:示教点偏移
11 发那科机器人三点法标定工具坐标系定点的操作过程
16_4KUKA机器人外部自动运行
56 发那科机器人修改机器人关节运动范围
09 发那科机器人内部点的映射连接
57 发那科机器人修改机器人的负重配置
68 发那科使用快速示教面板完成示教
04 发那科机器人创建一个程序并示教轨迹a
05 发那科机器人创建一个搬运项目a
79 发那科机器人用模型面板创建数模
37 发那科机器人在程序中使用io链接plc
第20讲 KUKA机器人调用当前位置变量
22 发那科机器人特殊区域设置
第26讲 KUKA机器人中断编程
78 发那机器人科快速切换观察面
46 发那科机器人在程序中使用查找指令
10_11KUKA机器人主程序对子程序的调用
第14讲 KUKA机器人FOR循环
74 发那科机器人用Path工具画运动曲线
【SolidWorks核心】2024最新版,学完即可就业!拿走不谢,别再走弯路了,学不会我退出机械圈
10 发那科机器人 爱的呈现-运动指令