V
主页
京东 11.11 红包
【吕家双壁】
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
未来工程师|大学学习|素养养成|观念
雅思自我阅读-自我提升
正在学习字幕制作
数值分析 | 第六讲 有效数字
学习敏锐度/自我提升的7个维度
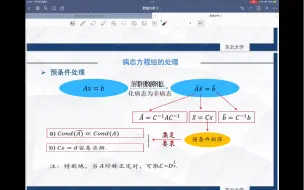
数值分析 l 第22讲 病态方程组的处理方法
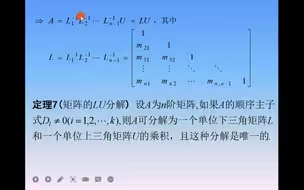
数值分析 | 第13讲 线性方程组的矩阵三角分解法(LU三角分解)
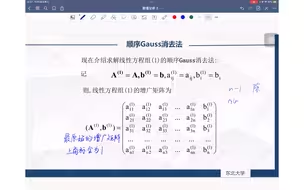
数值分析 l 第12讲 l 顺序高斯消去法
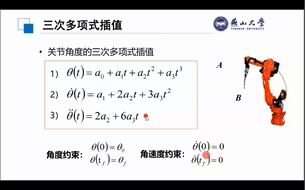
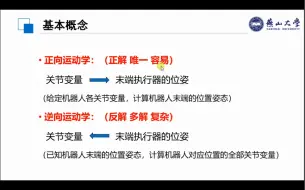
机器人学 l 7.2 轨迹规划中的三次多项式插值
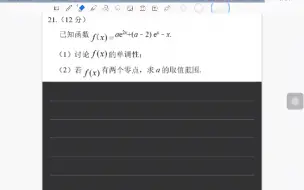
好题值得多次练习
“做饭、做爱、做人”诺奖小说《素食者》深入解读
可能导致不开心的五种思维模式
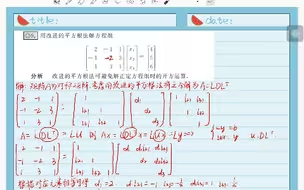
数值分析|习题讲解4|改进的平方根法求解线性方程组
自动控制原理/西安交通大学/数学模型/微分方程
机器人学 l 3.5 速度雅可比矩阵的位置求导法
英文-如何形容一个人-形容词分类总结
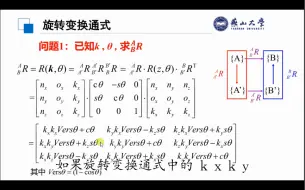
机器人学 l 2.6 旋转变换通式(等效转轴与等效转角)
英语表达/慢慢自我提升/演讲力
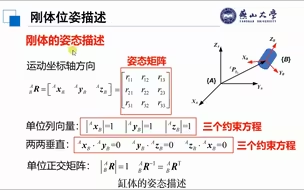
机器人学 l 2.5 姿态描述方法:RPY角和欧拉角
拍校园的花 以及一些感想
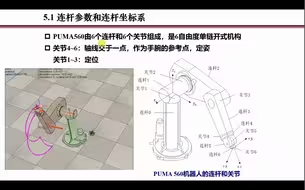
机器人学 l 3.2 连杆变换和运动学方程(正向运动学)
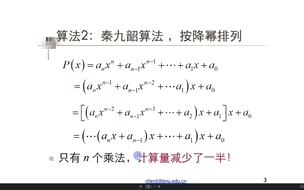
数值分析 | 第三讲 | 算法研究的重要性
说个笑话:中医教材,自带防自学功能!
机器人学 l 3.3机器人逆向运动学(以puma560为例)
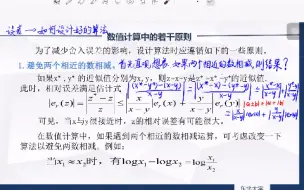
数值分析 I 第8讲 I 数值计算的原则1 避免两个相近的数相减
【非暴力沟通】表达需要/与世界和解/处理愤怒
7分钟解释每个困境
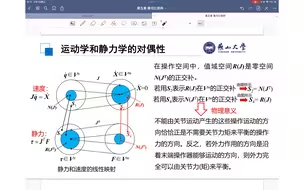
机器人学 l 3.8 力雅可比矩阵以及运动学和静力学之间的对偶关系
数值分析 | 第14讲 | 矩阵LU三角分解(举例)
INTP人格特质分析
机器人学 | 2.3 齐次变换矩阵及其三重物理意义
知行合一 l [想的多做的少]现象的剖析
英语词汇记忆/英语口语
关注自己的生活 | 做自己生活的主人
托福写作分享
自动控制原理|数学模型|自学
英译汉/CET6/语料素材积累1
机器人学 | 2.1 机械臂的位姿描述(重点为旋转矩阵)
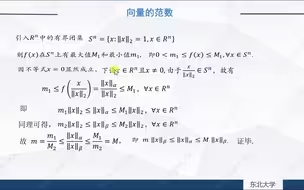
数值分析 | 第18讲 | 向量范数的等价性定理 向量序列的收敛性定理
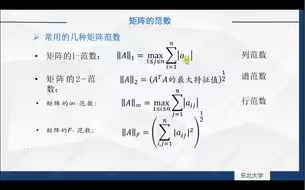
数值分析 l 第19讲 矩阵范数