V
主页
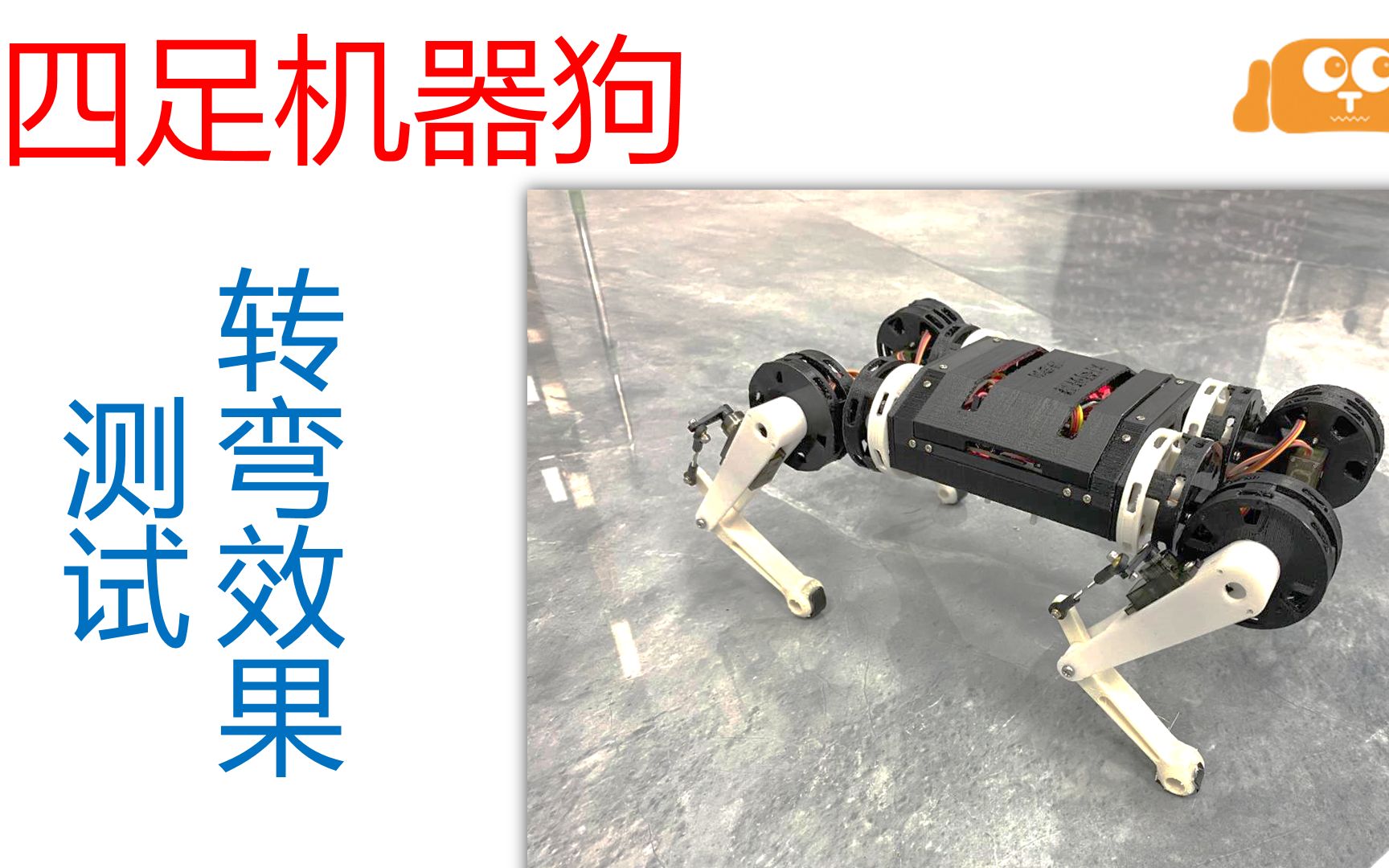
灯哥开源四足机器人--菠萝狗转弯效果测试
发布人
0基础DIY四足机器人指南 课程目标:浅显易懂、大家都能自己设计属于自己的四足机器人 Q群:1071643412 菠萝狗转弯效果测试
打开封面
下载高清视频
观看高清视频
视频下载器
【教程】灯哥0基础DIY四足机器人指南(新版)--全集更新中!!(2021.5.14)
【自制】低成本迷你四足机器人 QR_MINI2 机器狗
赛博宠物|一只四足机器狗的诞生【开源】
大二小白自制百元级机器狗
灯哥0基础DIY四足机器人指南(9)--手把手教你写出小跑步态程序
菠萝狗二代开源预告!!同步重制灯哥0基础DIY四足机器人指南,带你0基础DIY波士顿动力机器狗
菠萝狗开源小跑步态标准调试参考效果(软件版本:PADOG V0.1.02 BETA 1 官方 2020423)四足机器人 四足机器狗
灯哥0基础DIY四足机器人指南(4)--机器狗运动学逆解与电路连接
开源无刷电机四足狗2代 中期技术展示【灯哥开源】【DengFOC】
【测试】【菠萝狗同手同脚走路PACE步态】舵机四足机器人
【教程】成本1K!从0教你DIY无刷四足机器人~灯哥无刷四足一代实验版开源啦!!!
【进阶教程】机器狗12自由度姿态变换【灯哥0基础DIY四足机器人指南】-进阶篇3
Py-Py Dog 2 兼具性价比和学习性的四足机器狗
灯哥开源四足机器人--5月25日菠萝狗开源软件大更新功能概览
开源狗优化后mg90s十元舵机步态效果 灯哥开源四足机器人 四足机器狗
【手把手教写FOC算法】1_起源,无刷电机概念与控制原理
灯哥开源通用四足机器人控制器--发布预告 菠萝通用控制器 Py-Apple Controller
【发布】不足百元!双路无刷电机驱动器 -灯哥双路无刷FOC驱动板正式开源!支持四足机器人!
灯哥开源四足机器人调参教程(1)--菠萝狗新调中系统使用方法(针对525软件大更新)
【测试】舵机小狗疯狂后空翻一分半钟!!后空翻测试v0.3~灯哥开源四足机器人 菠萝狗
舵狗高级功能 爬楼梯V1.0 灯哥开源四足机器人 机器狗
200元低成本桌面四足机器人无刷并联腿原型机
【开源!手把手教做力反馈电机旋钮】1_概论和课程简介
【进阶教程】机器狗12自由度逆解【灯哥0基础DIY四足机器人指南】-进阶篇1
舵狗高级功能 爬楼梯V2.0 灯哥开源四足机器人 机器狗
机器狗mg90s舵机寻线测试 灯哥开源四足机器人
【进阶教程】机器狗12自由度正解【灯哥0基础DIY四足机器人指南】-进阶篇2
灯哥开源四足机器人控制器 第六课 自定义四足机器人参数,将控制器用于自己的四足机器人
【百元级开源双路FOC升级版】大电流航模电机闭环测试【DengFOC】
四足机器狗walk步态测试 四足机器人
灯哥0基础DIY四足机器人指南(8)--用Matlab画出摆线步态曲线
【教程】无刷FOC平衡车算法原理和DIY实现
教你写一个比SimpleFOC更好的电机库
灯哥开源四足机器人--并联菠萝狗小跑速度测试
灯妹四足机器人数学知识小课(1)--旋转变换
舵狗Pronk步态向后跳跃 灯哥开源四足机器人 四足机器狗
灯哥开源四足机器人调参教程(2)--带轴承腿部的安装
LQR无刷动量轮倒立摆算法原理和DIY实现【附实例DIY项目】【灯哥开源】【从零教系列】【DengFOC】
【手把手教写FOC算法】2_克拉克变换,建立简化电机数学模型
最便宜的力反馈模拟飞行摇杆,带给你全真飞行体验!