V
主页
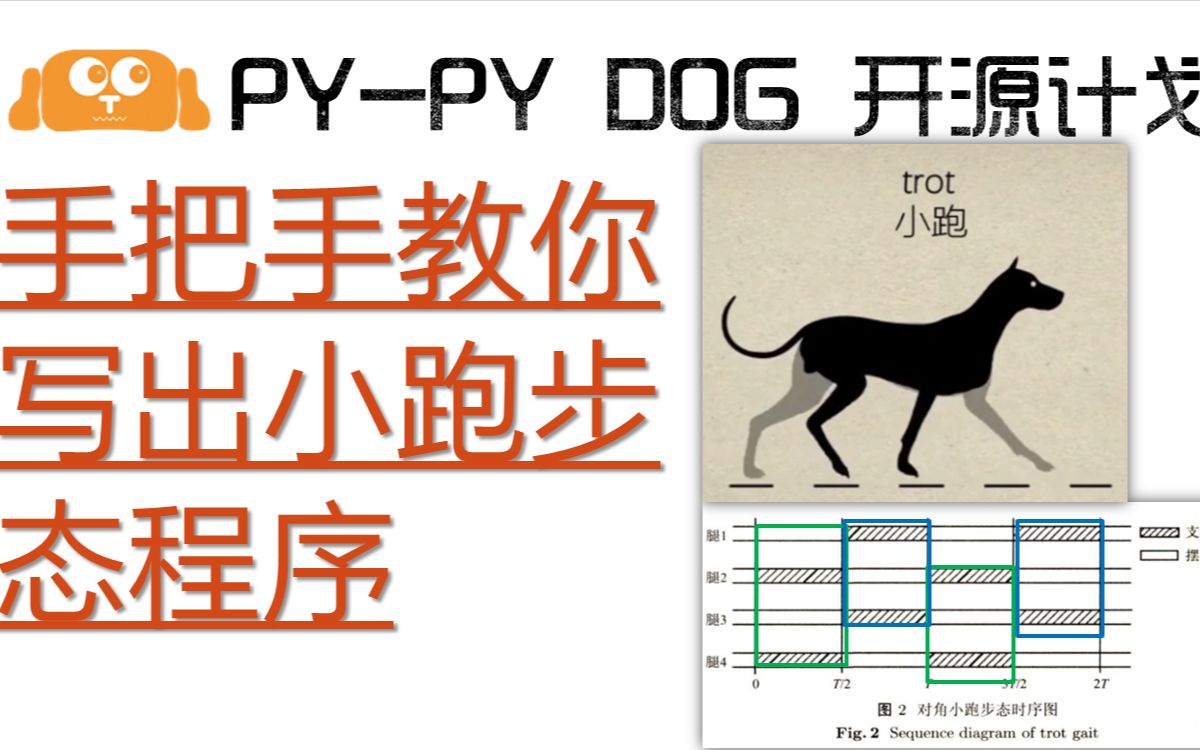
灯哥0基础DIY四足机器人指南(9)--手把手教你写出小跑步态程序
发布人
0基础DIY四足机器人指南 课程目标:浅显易懂、大家都能自己设计属于自己的四足机器人 论坛:www.leggedrobot.cn Q群:1071643412 开源Github:https://github.com/ToanTech/py-apple-quadruped-robot 本课内容: * 第九课 手把手教你写出小跑步态程序 * 课程简介:介绍了步态和相位差的基本概念,同时手把手带大家做了一遍小跑步态的程序实现 希望大家多多支持,喜欢的话一键三连并关注
打开封面
下载高清视频
观看高清视频
视频下载器
灯哥0基础DIY四足机器人指南(4)--机器狗运动学逆解与电路连接
灯哥0基础DIY四足机器人指南(2)--机械设计要点
【进阶教程】机器狗12自由度姿态变换【灯哥0基础DIY四足机器人指南】-进阶篇3
灯哥0基础DIY四足机器人指南(8)--用Matlab画出摆线步态曲线
舵狗高级功能 VMC伪力控WALK步态踏步
灯哥开源四足机器人--跳跃(起跳相)测试
【教程】成本1K!从0教你DIY无刷四足机器人~灯哥无刷四足一代实验版开源啦!!!
灯妹四足机器人数学知识小课(1)--旋转变换
无刷桌面四足机器人串联腿腿部测试
六足机器人重大更新,手把手教你制作
灯哥开源四足机器人调参教程(2)--带轴承腿部的安装
聊一聊项目、外加简易安装大腿结构的装配试验 灯哥开源四足机器人
灯哥开源四足机器人控制器 第六课 自定义四足机器人参数,将控制器用于自己的四足机器人
舵狗高级功能 爬楼梯V1.0 灯哥开源四足机器人 机器狗
灯哥开源四足机器人--菠萝狗转弯效果测试
灯哥0基础DIY四足机器人指南(7)--软件架构、高度调节与逆解的实现
【发布】不足百元!双路无刷电机驱动器 -灯哥双路无刷FOC驱动板正式开源!支持四足机器人!
灯哥0基础DIY四足机器人指南(6)--3D建模入门与新菠萝狗构型
舵狗Pronk步态向后跳跃 灯哥开源四足机器人 四足机器狗
舵狗自稳结合摔倒自恢复 灯哥开源四足机器狗 灯哥开源菠萝四足机器人万能控制器
【自制】我开发了一个通用机器人大脑!【硬核】
Py-Py Dog 2 兼具性价比和学习性的四足机器狗
开源狗优化后mg90s十元舵机步态效果 灯哥开源四足机器人 四足机器狗
灯哥开源四足机器人--并联菠萝狗小跑速度测试
开源舵狗控制程序新软件架构和二次开发简介 Py-apple dynamics 灯哥开源四足机器人 四足机器狗
灯哥开源四足机器人--5月25日菠萝狗开源软件大更新功能概览
自制百元级迷你FOC无刷电机驱动器v2.0 模拟力反馈调节旋钮测试
开源无刷电机四足狗2代 中期技术展示【灯哥开源】【DengFOC】
【进阶教程】机器狗12自由度正解【灯哥0基础DIY四足机器人指南】-进阶篇2
灯哥开源四足机器人控制器 第四课 舵机标定系统的使用
灯哥开源四足机器人--并连腿菠萝狗效果测试
灵动Ω双足轮机器人多自由度并联腿原理设计
VMC伪力控开源四足机器狗 替代运动学逆解 灯哥开源四足机器狗 舵狗高级功能
【发布】多地形适应双足轮腿机器人&一言不合,翻山越岭【灯哥新世代机器人计划X-WALKER】
【手把手教写FOC算法】4_帕克变换
【手把手教写FOC算法】1_起源,无刷电机概念与控制原理
【手把手教写FOC算法】2_克拉克变换,建立简化电机数学模型
百元级舵狗走随机地形v0.1 mg90s舵机 灯哥开源四足机器人
【测试】开源舵狗后空翻v0.1~菠萝开源四足机器狗-灯哥开源黑科技
自制百元级迷你FOC双路无刷控制器 版本v1.0测试