V
主页
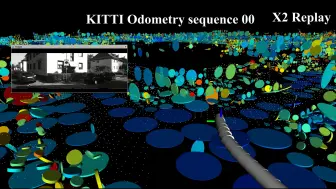
Swarm-LIO2: 适用于无人机集群的分布式、高效激光雷达惯性里程计
发布人
无人机集群在生活、科技等各个方面具有极大的潜力,比如合作探索、搜救、目标跟踪等应用。为了解决这些高层应用任务所需的集群定位问题,我们提出了 Swarm-LIO2:一种用于无人机集群系统的,完全分布式、即插即用、计算效率高、带宽效率高的激光雷达-惯性里程计。我们的方法可以实现实时、精确的自身以及相互状态估计,可以支持多种集群应用(目标跟踪、集群探索、协同搬运等),并且在激光雷达退化场景(几何纹理缺失)以及相机退化场景(黑夜)保持鲁棒性和有效性。据我们所知,这是世界上第一个专为无人机集群设计的激光雷达惯性里程计框架。我们的代码将会开源在https://github.com/hku-mars/Swarm-LIO2,相关论文即将发布。
打开封面
下载高清视频
观看高清视频
视频下载器
浙大Science Robotics封面 全自主微型飞行机器人集群
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
[IROS 2024] AS-LIO: 空间交叠度指导的自适应滑窗激光惯性里程计
ICRA2023 | Swarm-LIO: 适用于无人机集群的分布式激光惯性里程计
港大MARS实验室发布! Fast-LiVO2:快速、直接的激光雷达惯性视觉里程计
配备激光雷达的小型自主无人机
浅浅试下新飞机——树林中超高速飞行
【浙江大学】浙大博导带你从0制作无人机
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
Point-LIO: 适用于剧烈运动的高带宽雷达惯性里程计
低成本、室内毫米级精度的开源运动捕捉系统
CU-Astro自主探索无人机室内外飞行演示:3.5寸紧凑型 (cuhk-usr-group)
用于精确在线激光雷达里程计的高效概率自适应体素地图
PULSAR: 能自主导航的单执行器自旋无人机
AutoFusion - 无人机集群协同自主定位与实时地图重建
IPC:集成规划与控制的框架,适用于存在突然出现物体与干扰的环境中的四旋翼导航
D-Map:用于高分辨率LiDAR传感器的无需光线投射的占据栅格地图构建
我和我飞导【浙江大学FAST Lab】
在茂密植被场景中的无人机斜坡检测
LTA-OM:长期关联激光雷达惯性里程计和建图
【完结】从0制作自主空中机器人 | 开源 | 浙江大学Fast-Lab
Output formation tracking of UAV-UGV swarm over jointly connected digraphs
Decentralized LiDAR-inertial Swarm Odometry (适用于无人机集群的分布式激光-惯性里程计)
TRLO: An Efficient LiDAR Odometry with 3D Dynamic Object Tracking and Removal
会飞的快递员!无人机集群送货上门
浙江大学 FAST-Lab 2021代表性研究成果 | 空中机器人 | 人工智能 | 集群机器人 | 自主导航
我国高校今年发表的五篇关于无人机的创新性研究成果,每篇都是被顶刊录入的存在!
浙大最新 Science Robotics 微眼动启发的新型事件相机
重新定义多旋翼无人机飞控范式:AeroTransformer is all you need
【开源】低成本DIY自动驾驶小车
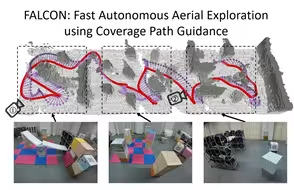
快速自主空中探索新框架:FALCON
IEEE'24 | 缩短1倍!南开最新基于动态拓扑图的多无人机探索框架!
ROG-Map:高效的机器人中心地图,适用于基于激光雷达的高分辨率、大场景的无人机运动规划
阿木SU17在无GPS弱光环境下依靠四目SLAM定位飞行展示
无人机集群智能控制
STD:用于3D地点识别的稳定三角形描述符
【集群协同】区域覆盖搜索围捕“练习生”
【SLAM】【VIO】双目视觉+超强三维感知力【功能演示——半稠密点云】“实测”
电力巡检,激光slam在电力方面应用,激光雷达应用
[预售]全新版本的imu