V
主页
京东 11.11 红包
就离谱!一键抠图,是时候和PS说拜拜了,超强发丝级抠图算法重磅开源!可在线试玩
发布人
试玩地址:https://github.com/PaddlePaddle/PaddleSeg/tree/release/2.5/Matting
打开封面
下载高清视频
观看高清视频
视频下载器
【六哥答疑】视觉SLAM目前效果最好的开源算法有哪些?
【最新开源】ECCV2022|美女秀发随风飘动,发丝抠图一点不差!延世大学&Adobe新研究
【直播回放】让机械臂自己学会6自由度抓取操控,代码已开源!
重磅开源!ETHZ&浙大&微软等提出NICE-SLAM:用于大型室内场景重建,细节控的福利!CVPR2022
【开源】太酷了!相机前转一圈,人体模型就有了!天津大学&清华等新研究,CVPR2022
机械臂:你在教我做事?谷歌X开源机械臂示教算法,RSS 2022
Ai发丝级精准抠图,无需PS,纯在线免费使用专业级图像处理,AI智能抠图实在是太方便了!
2021年度盘点:十大最佳开源SLAM算法!
【开源】普林斯顿大学发布|端到端深度神经视觉DROID-SLAM,大大超越传统方法!支持单目、双目和RGB-D!
【入门必看】视觉惯性SLAM“灭霸”:ORB-SLAM3
【开源】CVPR2022|UBC&谷歌研究光场渲染的新视图合成,可准确再现场景!解决了反射、折射和半透明等问题!
ICRA 2022盘点:SLAM方向十大重点论文解读
【即将开源】DM-VIO:仅单个相机和IMU优于双目惯性方法!RA-L
【开源】LLOL:旋转激光雷达的低延迟里程计法|宾夕法尼亚大学
即将开源!清华&北航&快手等研究DoubleField用于人体重建!CVPR2022
华盛顿大学与英伟达联合开源!用于大规模仿真环境和机器人运动控制
无GPS下,即可在杂乱的森林环境中自主飞行!宾大开源!
【直播回放】多目标追踪和跨镜头追踪的介绍、困境、策略、展望
【直播回放】视觉惯性SLAM系统理论与实践(上)
【开源】ICRA2022|CMU新工作,自主勘探开发环境与规划算法
代码及数据集均开源!苏黎世大学提出事件相机稠密光流估计算法,误差减少66%!3DV 2021
【开源】超强算法!动漫人脸自由切换,高分辨率视频风格化!南洋理工发布
【直播回放】视觉惯性SLAM系统理论与实践(下)
【最新开源】TUM&谷歌等研究RGB-D表面重建,细节拉满!CVPR2022
【推荐系统算法实战】通俗易懂!基于用户的协同过滤推荐算法实现简单在线电影、音乐、图书等推荐系统实战!(AI/人工智能/计算机视觉/深度学习/神经网络)
【开源代码】SG-Net: 单阶段视频实例分割效果展示丨CVPR2021
西北工大开源DenseFusion:多无人机协同实时稠密重建方法!
仅需3张图像即可合成逼真新视图,学习NeRF并优化相机姿态!ETHZ&Google等开源,CVPR2023
【即将开源】肌肉+骨骼级的手部重建,连掌纹皱纹都清晰可见!中科院&上科大等新研究,SIGGRAPH2022
超实用AI批量抠图软件!免费又高效!
深度学习三维重建学习计划
强!手机平板上都可实时高效渲染的神经辐射场,谷歌新开源MobileNeRF!
深度学习特征实现机器人长期视觉定位,白天夜里什么光照都hold住!ICRA/RAL 2022
【原创】初学者如何入门计算机视觉?思维导图一条龙路线规划,保姆级教程!
【直播回放】做研究如何寻找创新点?
AI绘画是作弊?评委不这么认为!!!
这个多模态SLAM可实现任意传感器数量松耦合,在GPS、视觉传感器失效时仍稳如老狗!
【开源】超全超新SLAM数据集!鱼眼+红外+事件+RGB+IMU+LiDAR+GNSS+RTK!上海交大研究,ICRA2022
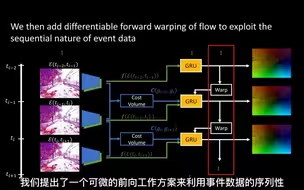
【最新开源】ECCV 2022|基于事件的光流估计,无监督法排名第一!庆应大学&柏林工大新研究
CVPR2022|德国宇航中心最新开源!高效率三维目标跟踪