V
主页
京东 11.11 红包
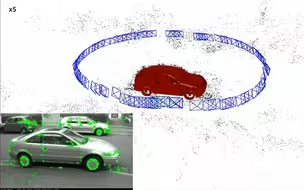
代码及数据集均开源!苏黎世大学提出事件相机稠密光流估计算法,误差减少66%!3DV 2021
发布人
https://www.youtube.com/watch?v=dN8fl7-XfNw&t=1s 我们主要发现的是与以前仅依赖卷积层的方法相比,引入相关特征显著改善了结果。与最新技术相比,我们提出的方法计算稠密光流,并在MVSEC上将终点误差减少23%。此外,我们还表明,迄今为止为事件摄影机开发的所有现有光流方法都已在位移场非常小的数据集上进行了评估,最大流量大小为10像素。我们介绍了一个新的真实世界数据集,该数据集显示的位移场的大小高达210像素,并且基于此观测的相机分辨率高出3倍。我们提出的方法将该数据集的端点误差减少了66%。 代码链接:https://github.com/uzh-rpg/E-RAFT 项目网页:http://rpg.ifi.uzh.ch/ERAFT.html
打开封面
下载高清视频
观看高清视频
视频下载器
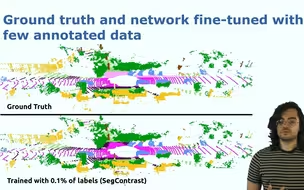
波恩大学最新开源代码!自动驾驶场景自监督三维点云表征学习,无需标注,RAL/ICRA 2022!
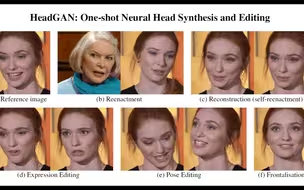
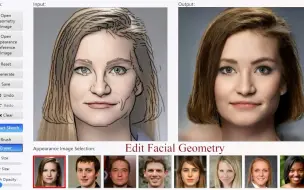
【前沿论文】帝国理工&华为提出头部合成和编辑算法,ICCV 2021
误差降低40%以上,华为诺亚发布单目视觉动作捕捉算法CLIFF!最新开源,ECCV2022!
武大最新开源:GNSS/INS组合导航开源代码KF-GINS详解
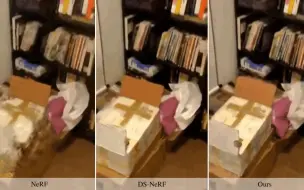
开源!CVPR 2022|TUM&谷歌研究院:基于稠密深度先验的稀疏NeRF重建
人物消失术!ICCV2021开源丨隐式远程传播内部视频修复
CMU新开源|改进27.7%的误差,首个处理动态环境的监督学习VO方法!ICRA2023
【六哥答疑】建立稠密地图的视觉SLAM,目前效果最好的开源算法有哪些?
【前沿论文】打假先锋,迄今最大的人脸深度伪造公开数据集|CVPR 2021 oral
开源!伦敦大学学院丨物体级语义SLAM :DSP-SLAM,3DV 2021
苏黎世皇家理工等发布!带闭环稠密神经SLAM
深度学习三维重建学习计划
【直播回放】让机械臂自己学会6自由度抓取操控,代码已开源!
行为识别实战:手把手带你从零到入门行为识别项目,算法详解+代码精讲,究极通俗易懂!
香港理工最新开源|实时LiDAR定位与Mesh建图,首个基于CPU的实时激光雷达SLAM系统!
有效处理遮挡、反光等问题,接近实时的三维重建!英伟达即将开源,CVPR2023!
西北工大开源DenseFusion:多无人机协同实时稠密重建方法!
2021年度盘点:有趣的AI开源算法,超简单就能试玩!
【开源】太酷了!相机前转一圈,人体模型就有了!天津大学&清华等新研究,CVPR2022
用文字、涂鸦等生成图片!英伟达提出PoE-GAN方法
【开源】中科院研究的智能P图神器!想改哪里画哪里!SIGGRAPH 2021
港科大等发布! EgoHDM:一种在线第一人称视角-惯性人体动作捕捉、定位和稠密建图系统
【开源】超全超新SLAM数据集!鱼眼+红外+事件+RGB+IMU+LiDAR+GNSS+RTK!上海交大研究,ICRA2022
手把手教你编译运行VINS代码
yyds!CMU最新开源无人机自主导航开发环境,加速无人机算法研发及部署!
哈工大博士分享:基于NeRF的SLAM技术发展与代表性开源算法介绍(上)
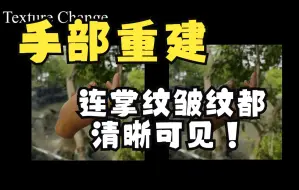
【即将开源】肌肉+骨骼级的手部重建,连掌纹皱纹都清晰可见!中科院&上科大等新研究,SIGGRAPH2022
计算机视觉领域新突破!YOLOv11奠定YOLO模型之王地位,将重新定义AI的可能性!
人类意图理解和识别:照片背后隐藏了什么含义?丨CVPR2021
双目VIO+点线特征+抗动态光照! 南洋理工最新开源!
即将开源!UCSD最新研究CoordGAN:人脸变雕像和油画,汽车颜色随便调 | CVPR2022
AI绘画是作弊?评委不这么认为!!!
逼真!视图合成新方法,比已有方法快1000多倍!CVPR2021
瑞典皇家理工博士分享开源算法: 点云地图动态障碍物去除基准
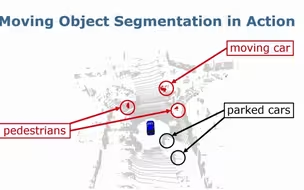
IROS 2021大牛团队最新开源!深度学习三维激光雷达动态物体分割
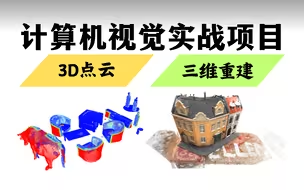
【3D点云+三维重建】最好出论文的研究方向,博导带你从零解读两大方向的核心算法PointNet与NeuralRecon!赶紧收藏
100+小时,45000m²的覆盖面积!首个用于AR的定位和建图基准!ETHZ等新开源,ECCV2022!
2024终于有科研大佬把“你的科研能力从什么时候开始突飞猛进的?”讲清楚啦!
SuperPoint和SuperGlue 的算法介绍及学习应用经验分享
21个令人惊艳的创业机器人公司!