V
主页
京东 11.11 红包
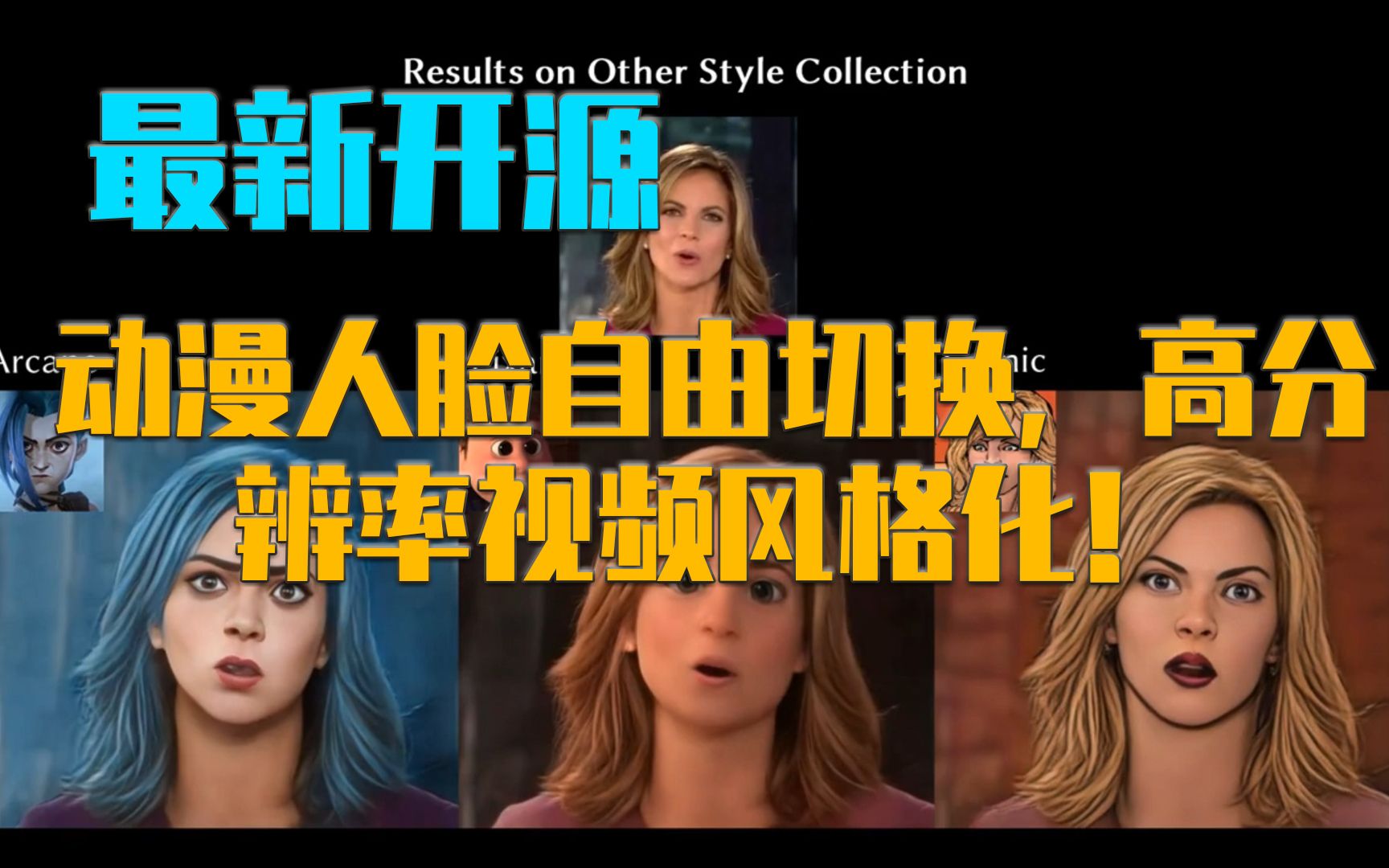
【开源】超强算法!动漫人脸自由切换,高分辨率视频风格化!南洋理工发布
发布人
生成高质量的艺术人像视频是计算机图形学和视觉领域的一项重要而理想的任务。虽然基于功能强大的StyleGAN提出了一系列成功的人像图像统一模型,但这些面向图像的方法在应用于视频时有明显的局限性,例如固定的帧大小、人脸对齐要求、缺少非人脸细节和时间不一致。在这项工作中,我们通过引入一个新的VToonify框架来研究具有挑战性的可控高分辨率纵向视频风格传输。具体而言,VToonify利用StyleGAN的中高分辨率层,根据编码器提取的多尺度内容特征渲染高质量艺术肖像,以更好地保留帧细节。由此产生的完全卷积结构接受可变大小视频中的未对齐人脸作为输入,有助于在输出中使用自然运动完成面部区域。我们的框架与现有的基于StyleGAN的图像工具化模型兼容,以将其扩展到视频工具化,并继承了这些模型的吸引人的特性,以便对颜色和强度进行灵活的样式控制。这项工作展示了构建在Toonify和DualStyleGAN上的VToonify的两个实例,分别用于基于收藏和基于范例的纵向视频风格传输。大量实验结果表明,与现有方法相比,我们提出的VToonify框架在生成具有灵活风格控制的高质量、时间连贯的艺术肖像视频方面的有效性。 代码地址:https://github.com/williamyang1991/VToonify 论文地址:https://arxiv.org/abs/2209.11224 项目主页:https://www.mmlab-ntu.com/project/vtoonify/
打开封面
下载高清视频
观看高清视频
视频下载器
双目VIO+点线特征+抗动态光照! 南洋理工最新开源!
香港理工最新开源|实时LiDAR定位与Mesh建图,首个基于CPU的实时激光雷达SLAM系统!
武大最新开源:GNSS/INS组合导航开源代码KF-GINS详解
北理工小姐姐视觉SLAM学习经验分享
南洋理工新开源|高保真、低成本!实现超分辨率图像重建!
【最新开源】SIGGRAPH 2022|在线试衣?输入文本即可任意更换衣服搭配,太有用了!南洋理工&商汤等新工作
【开源】CVPR 2022|帅哥变美女,二哈变萌宠?南洋理工新发布无监督图像迁移,纵享丝滑!
【最新开源】照片修复大师上线了,一键即可修复受损图片!南洋理工大学新研究,CVPR2022
【全874集】目前B站最全最细的ChatGPT零基础全套教程,2024最新版,包含所有干货!一天就能从小白到大神!少走99%的弯路!存下吧!很难找全的!
【前沿论文】帝国理工&华为提出头部合成和编辑算法,ICCV 2021
又来一款平民版高清图传,全民高清时代要来了
【最新开源】CVPR2022|3D图片风格化,从单一图像生成风格化的新视图!威斯康星大学+Snap研究院发布
【入门必看】视觉惯性SLAM“灭霸”:ORB-SLAM3
立体匹配算法原理与应用-奥比中光
【开源】普林斯顿大学发布|端到端深度神经视觉DROID-SLAM,大大超越传统方法!支持单目、双目和RGB-D!
手把手教你学习标定基础知识
【开源】ICRA2022|CMU新工作,自主勘探开发环境与规划算法
【即将开源】脸书&MPI&港大新研究StyleNeRF:2D图像合成高清3D风格化图!奥利给!
深度学习三维重建学习计划
【直播回放】SLAM常见面试问题浅析
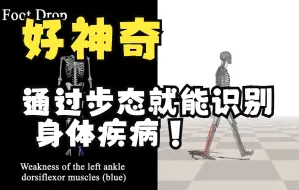
SIGGRAPH 2022|通过步态就能识别身体疾病,好神奇!
祝融号火星车如何选择最佳着陆点?详解背后的人工智能技术!
谷歌机器人子公司Intrinsic最新开源机器人抓取,无需收集数据或人工标注! ICRA 2022
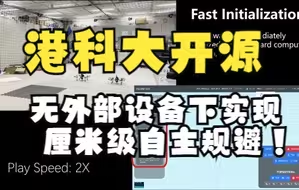
无外部设备下,可实现厘米级自主规避!港科大&大疆新开源!
手把手带你入门SLAM
虚幻引擎5中制作吉卜力风格树的秘密 - 附文件项目下载
港中大最新开源|2D秒变3D,基于2D场景风格化的光线配准!CVPR2023
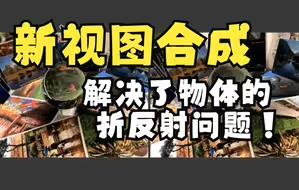
【即将开源】SIGGRAPH 2022|有玻璃场景的新视图合成,解决了物体的折反射问题,比NeRF更高清!MPII&DTU等新发布
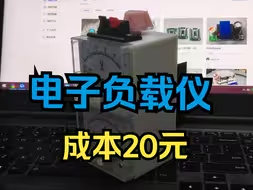
仅需20元的电子负载仪
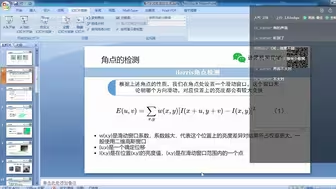
角点的提取、跟踪与筛选
【线下讲座】邹镇洪:科研小白如何入门自动驾驶?
【开源】刑天10轴正式发布
即将开源|面向对象概念学习的新基准!上海交大
【开源】UCLA提出轻量前端直接激光雷达里程计,针对弱算力平台!
【SLAM前沿讲座】MIT|SLAM的过去、现在和未来
NeurIPS'24三维网格生成新模式!自回归大语言模型也能生成三维网格?
【开源】DSOL:一种快速直接稀疏里程计方案,处理速度提高5倍!宾夕法尼亚大学
【即将开源】DM-VIO:仅单个相机和IMU优于双目惯性方法!RA-L
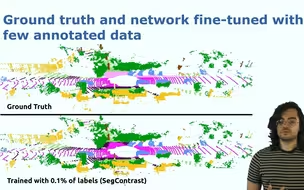
波恩大学最新开源代码!自动驾驶场景自监督三维点云表征学习,无需标注,RAL/ICRA 2022!
华科大最新工作分享:基于激光雷达-惯导-轮速计的联合状态估计!