V
主页
这个多模态SLAM可实现任意传感器数量松耦合,在GPS、视觉传感器失效时仍稳如老狗!
发布人
https://www.youtube.com/watch?v=S91GzCWBt2I 这项工作提出了一个多模式SLAM(MIMOSA)框架,该框架基于非线性因子图,提供任意数量的传感器实现松耦合融合,非常适合用于缺乏GPS和视觉退化环境。该方法包含基于可见光和热成像的点云配准和里程估计融合模块。
打开封面
下载高清视频
观看高清视频
视频下载器
ICRA2022|浙大&商汤等发布紧耦合RGB-D视觉惯性VIP-SLAM,速度快2倍!
【六哥答疑】视觉SLAM目前效果最好的开源算法有哪些?
清华深研院、哈工深发布!Lidar视觉紧耦合实时相对定位
【六哥答疑】多传感器融合SLAM都有哪些框架?作为研究生课题研究方向如何?
强推!【SLAM核心算法】中科院博士一口气带你学完无人驾驶:原理、激光、无人机、VR、传感器、计算机视觉!(人工智能、深度学习、机器学习、神经网络、图像处理)
【CMU开源】数千美元的设备即可提供百万美元级的地图质量!无GPS下,高精度地图合并!
计算机视觉与SLAM的区别
牛津大学|这个IMU+四个相机的视觉惯性里程计真不错!漂移率降低80%、相对位姿误差降低39%!
【OpenCV精华版教程】哭了,现在才知道,原来OpenCV得这么学(图像处理/人脸识别/机器视觉/人工智能)
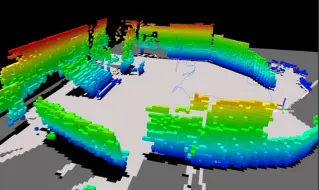
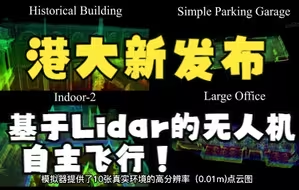
复杂环境下,基于Lidar的无人机自主飞行!港大最新发布!
【YOLOv10】12分钟通关YOLOv10,环境搭建、模型训练、验证推理、导出、数据集
苏黎世皇家理工等发布!带闭环稠密神经SLAM
【开源】普林斯顿大学发布|端到端深度神经视觉DROID-SLAM,大大超越传统方法!支持单目、双目和RGB-D!
4D毫米波雷达与单目相机的标定与融合
传感器在SLAM算法部署中的经验及避坑
双目VIO+点线特征+抗动态光照! 南洋理工最新开源!
OpenAI绝密文件泄露:2027年实现AGI,人工智能觉醒即将到来
CMU等机构发布超强VSLAM数据集TartanAir,用于探索视觉SLAM极限!
【即将开源】换头技术,它又双叒叕来了!比比哪家强?华南理工&百度最新研究HeSer实现动态换头!CVPR2022
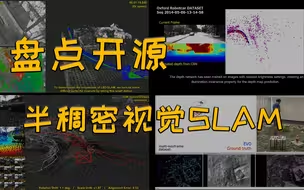
【原创】优秀开源代码盘点:半稠密视觉SLAM
客户要求窄通道65cm,机器人导航重新调试,雷达融合3d避障
手把手带你入门SLAM
强推!这可能是B站最全的(Python+机器学习+深度学习)系列课程了,堪称人工智能系列课程的巅峰之作!-人工智能/深度学习/机器学习
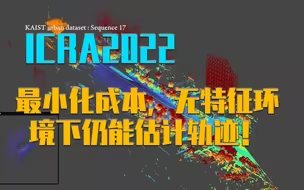
ICRA2022|最小化成本,无特征环境下仍能估计轨迹!全局一致和紧耦合的3D激光惯性建图!
学术大佬答疑解惑!关于语义激光SLAM,说不定有你想知道的!
ECCV'24开源 | 拳打ORB3脚踢DROID!强化学习+VO=精度暴涨19%!
ICRA2022|单个360°相机的视觉里程计,无需校正即可获得全方位感知!港科大发布
误差降低40%以上,华为诺亚发布单目视觉动作捕捉算法CLIFF!最新开源,ECCV2022!
搞科研论文看不懂怎么办?
【线下讲座】占云龙:SLAM技术发展与存在的问题
就离谱!一键抠图,是时候和PS说拜拜了,超强发丝级抠图算法重磅开源!可在线试玩
【线下讲座】史雪松:室内机器人系统的长期视觉定位与建图
【开源】基于激光点云的无监督类无关实例分割算法,RAL22!
结合创新,小波变换+注意力机制,实现100%分类准确率
极端环境下,雷达的3D自我运动规划,可实现真实的传感器部署!韩科院研究!
哈工大博士分享:基于NeRF的SLAM技术发展与代表性开源算法介绍(上)
无标记环境下高分辨率雷达和相机像素级外参自标定
【最新技术】ANYmal C 机器人自主探索地下矿井
上海交大最新开源|GNSS/INS/Camera融合导航库GICI-LIB
【直播回放】视觉惯性SLAM系统理论与实践(下)